@xRiloKOTBx I am not sure what you are trying to say. The power loss problem with Mecanum wheels is exactly because they are tilted.
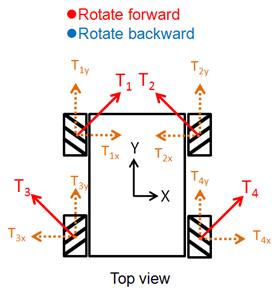
From this force diagram (source) you could see that to generate forward moving forces (T1y,T2y) Mecanum wheels need to have sqrt(2) larger reactive forces (T1,T2) against the ground and exert perpendicular cancelling forces (T1x,T2x) on the vehicle chassis:
Similarly this is the force diagram for the sideway movement:
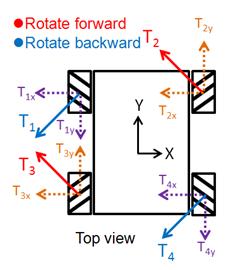
and another one for the robot turning clockwise:

Depending on the amount of friction you have in all your bearings you could easily need 1.5 times more motors just to keep up with the simple non-holonomic “tank” drive. (It is actually tricky because extra friction in the rollers themselves favors forward-backward movement vs. sideways movement).
However, if you pay close attention to the condition of rollers and keep everything properly lubricated you could have all Mecanum drive that will outrun and outpush every other robot on the field. You just have to decide if extra motors going into powering the drivetrain are worth the competitive advantage you will get.