When you move straight forward or backward, mecanum rollers do not rotate relative to the wheels, so no energy is lost there.
However, since rollers are angled at 45 deg to the wheel, they generate forces perpendicular to the wheel’s plane, that push wheels into the robot chassis and result in extra friction losses when moving. (In contrast, Omni tank drive has no perpendicular force component).
See this post for more diagrams.
You will need to place well lubricated teflon or nylon washers between mecanums and the chassis to reduce the energy losses.
When you try to move sideways or turn, then friction between rollers and mecanum wheels starts contributing to the energy losses. Same as with the omnis, you could regularly wash your wheels in warm soapy water to remove all the sticky stuff that tends to accumulate around the rollers.
Another consideration is how much useful traction and pushing force you could get out of your robot’s weight.
Omni tank drive has the best conversion factor (1) for pushing forward but close to zero for resisting any sideway pushing.
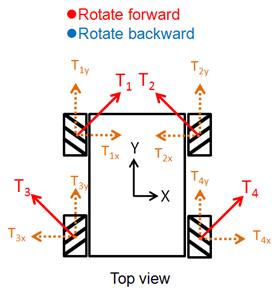
However, for the mecannum or omni x-drive setups it is less efficient. To generate 1 unit of forward or sideways pushing force you will need 1*sqrt(2) units of ground traction (see more CoF info here and force vector diagrams here).