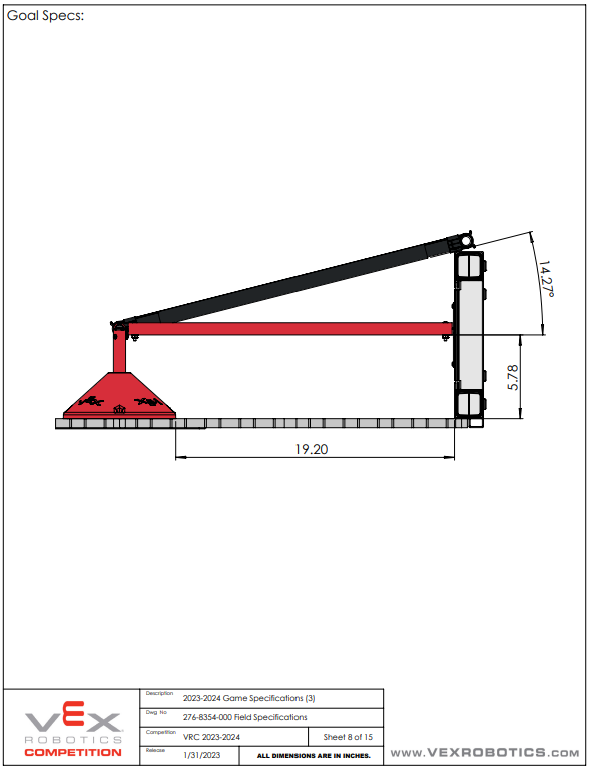
The game manual says that the triballs are 6.18" long and the goals are 5.78" high at their lowest point. This would mean the triballs don’t fit under the goals according to these dimensions, but the game reveal video showed that they could. Since the game video also showed the triballs to be 6.18", I’m guessing the height of the goal is wrong. The Q&A hasn’t opened yet, so just posting this observation here.

This could be a typo, but I kind of doubt it. Since the height of the goal and height of the triball are so close to each other, it’s probably still possible to score a ball through the front by pushing, but this does make it harder to just shoot all the match loads immediately underneath the goal. Imo it’s probably intentional
Grant clarified during the second game unveil that this was intentional
It is not a typo. Look at the CAD and the game video. The intent is that the tri-ball can only slide in if it is rolling because there is a foam layer on the pole. Slow down the game release video to 0.25x or go frame by frame.
I feel like plastic pipe might bend, so you can force the pipe in. I heard some people iterate that it was meant to be this way. So probably they’d want it different than last year.
After the ms/JROTC/vexu game reveal, grant (the walking cortex motor) said they were intentionally slightly bigger so you had to push it in. He said it was so you couldn’t shoot in. Replay the livestream at vexworlds.tv
Grant said that this is intentional after MS worlds was over.
Never mind what I posted earlier, I just missed that part of the livestream.
This means that making a solo-autonomous-win-point code is impossible!
Impossible is nothing. Imagine a robot that bounces a triball of their alliance robot or something else to get the triball in through the side
While it may be impossible, I’m sure this was intentional. This game seems to be built on teamwork. In past years (tipping point, spin up, etc), an experienced, skilled team with an advanced robot could carry a les experienced team with a simpler robot to a match win. This year it seems like vex really wants teams working together. AWP seems fairly easy this year. A pushbot can score your alliance preload into the correct goal, while you take an acorn out of the match load area and touch the alliance crossbar. If needed, you could probably code a simple autonomous for your teammate in 5 minutes before your match starts.
That’s been my take on this game so far, as well.
This is also guidance I plan to suggest to my team. Assuming you believe yourself to be a “more capable team”, find your “less capable partners” early, and help them write a simple auton to push the alliance triball into the alliance goal while your robot does the 2 harder tasks.
Only bad thing about this is good teams with a bad schedule will have a bad rank.
That seems to me to be an exceedingly pessimistic view. As Dave-TBR correctly points out, it seems like the GDC’s intent is to foster teamwork within the alliances. Taking 30 minutes at a competition to make sure and help all of your partners with a 5 minute “go straight, turn, go straight” auton will really help new teams see how easy autons can be as well as increasing the emphasis on the “people” part of this robotics competition and espousing the 515R “Passing It On” motto I recently found out about.
Yes, the heavy emphasis on team chemistry and working together is my favourite aspect of this game. It seems very refreshingly different to recent games.
Auton does seem quite dry though. Very few triballs can be accessed during auton. At World Finals, the field will be quite clear in the first 10 seconds of auton, and then an awkward gap like tipping point.
It will be interesting to see if you are right.
For the field to be cleared, the alliance partner on the non-goal side will have to transfer 1-3 triballs past the barrier, then the goal-side partner will have to find and score them autonomously. Might be possible with the vision sensor – flawed though it is, finding objects on the ground is probably its best use – but it would be a challenge for a bot to autonomously find and score objects from random locations.
Even scoring the 5 field triballs of known location will be a bit tricky, since each has to be scored independently and the pathing is long due to the short barrier. Only one is positioned in a way that it could be pushed in while possessing.
The sides of the goals are also the same height if you looked at the images in the notebook. I believe what he said and that they want teams to work together. I wish the sides were open though, it would make autonomous win point programs so much easier to do.
Auton does seem quite dry though. Very few triballs can be accessed during auton. At World Finals, the field will be quite clear in the first 10 seconds of auton, and then an awkward gap like tipping point.
But you only need two vertices under, so it is possible to score through the side.
Does anyone have an inventor file for the game object?