I need some advice.
I’m working on this massive crane with my vex. Now it’s not really a bot at this time it’s a machine. But i’m wanting to change that. Here is the projects I would like to see happen to the control module.
I’m going to have 2 control mod’s operate this machine. I want to seperate the user input from the auto behavior.
Mod 1 = User input
This mod will operate the foward, reverse, rotational platform, and raising and lowering of the hook.
A total of 4 Motors and 3 limit switches will be connected.
TXChannel 1 Platform left till 90 degrees off center then hits a limit switch to stop the turning in both directions.
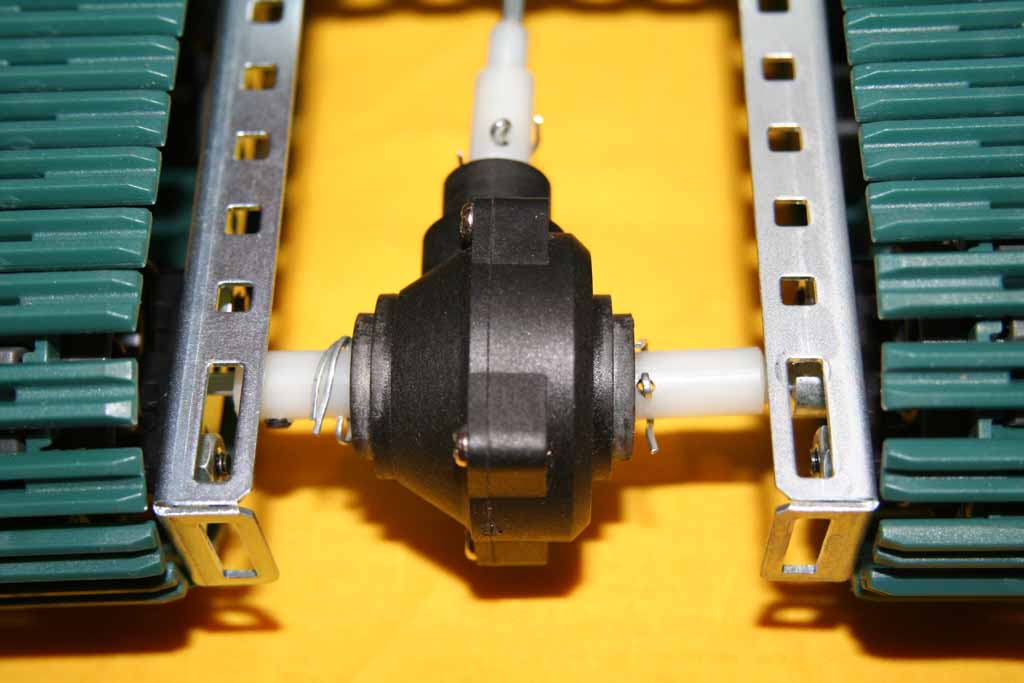
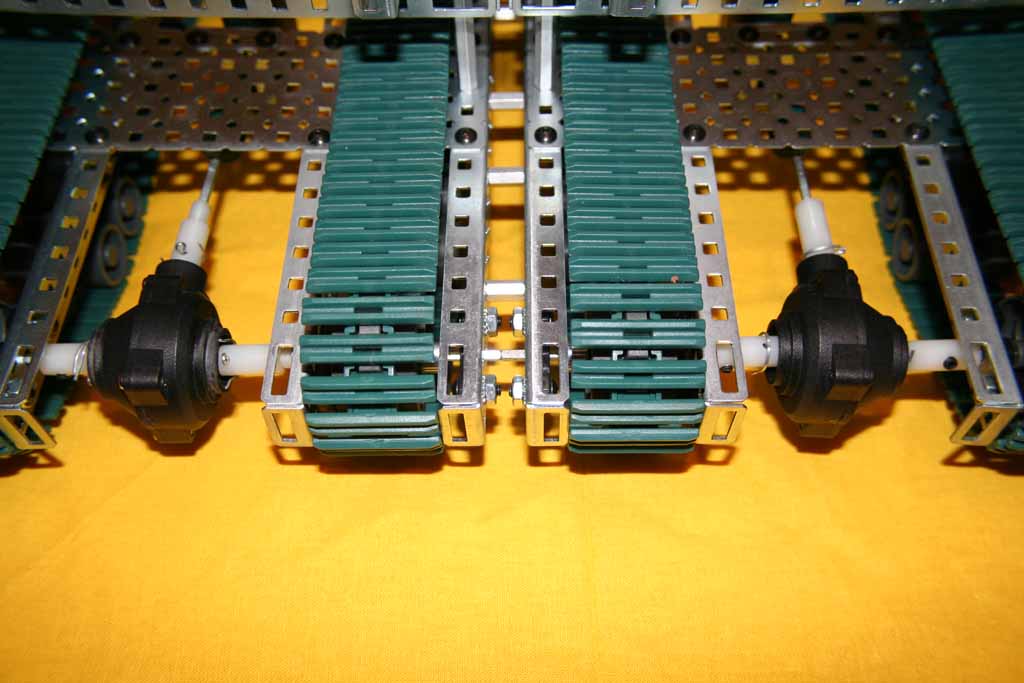
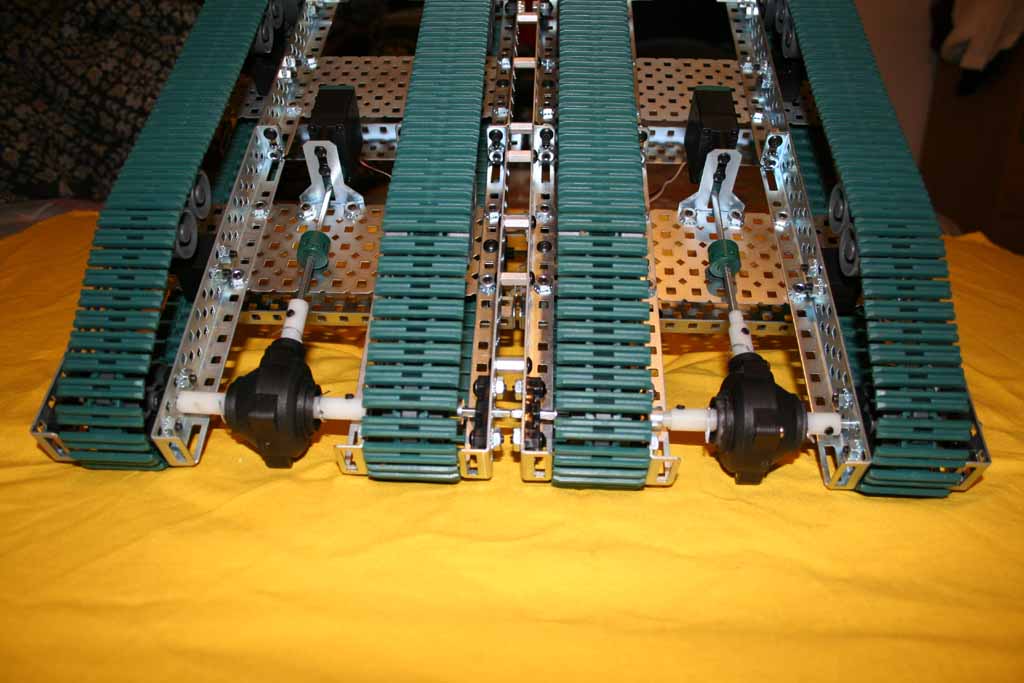
TXChannel 2 Right side set of tracks foward and reverse motion
TXChannel 3 Left side set of tracks foward and reverse motion
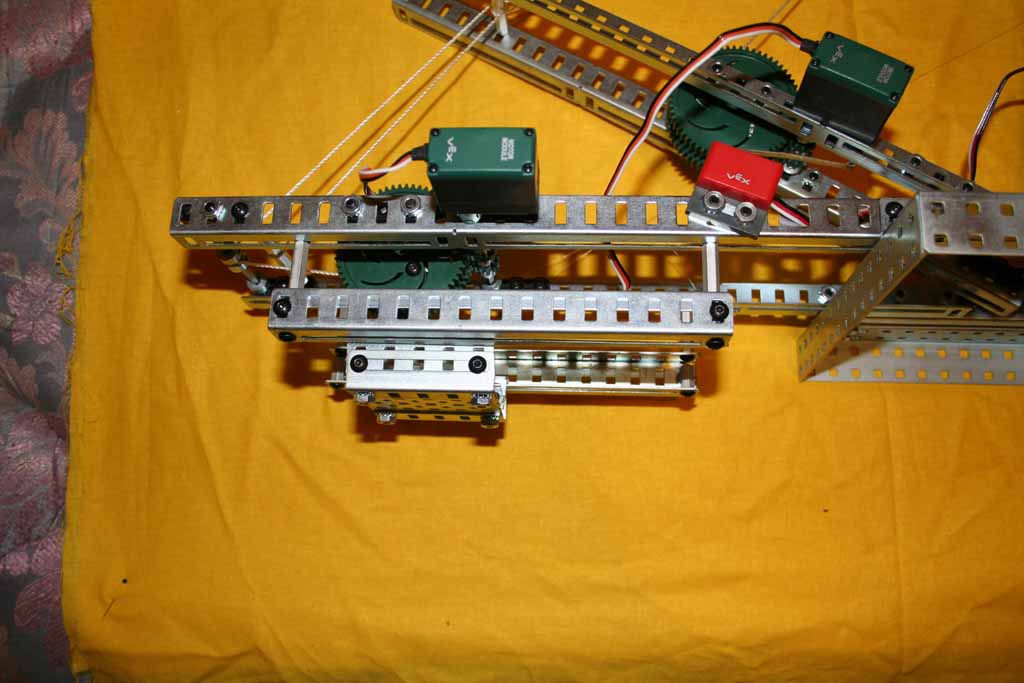
TXChannel 4 Hook lift and lower. with the lift having an upper limit switch. to stop the lift at it’s highest point.
Mod 2 = Auto behavior
Will monitor multiple limit switches within the machine to be used as an auto balance mechinism.
This mod will have:
3 Motors
3 Line followers ( aka 1 set ) (possibility)
3 Optical shaft encoders (OSE)
10 limit switches
As unit starts to tip foward front limit switch is activated, tiggering a sub-rutine that will use the arms first to correct the off balance condition. If changing the lifting arm positions does not change the condition then it will activate a second sub-rutine that will adjust the counter weight to correct condition.
When the unit is first turned on it will go into a diagnostic mode which will activate all motors and put them into a limit switch then relying on the OSE will determine position in relation to each other.
**Tricky part **
When any of the sub-rutines are triggered then there needs to be a comm link between the two mods that puts mod 1 into “dead mode” where it does not work till the rutine is finished. If the rutine fails to complete it’s mission after a said time it releases the “dead mode” where the user interface is limited to righting an unsafe condition.
Lifting something too heavy the bot trys to auto compensate and fails, thus releasing the controls to lower the lifting motor only.
I know that this will be intensive if not impossible to be able to do it all. I also understand that you will need diagrams to pictures to help you understand this. and I will stive to post them. Please know that I’m not looking for someone to do this for me. I have a friend in real life who is going to help me program it he’s able to program with many utilities. But What I’m looking for is a community effort. If you know something Or have encounterd a situation that might be benificial then please add it. I feel this might take a few months to get it right.
Eventually, If this does work out with semi auto behavior I would like to see it on a barge. Lifting sunken R/C Boats from the water.