I have connected a Raspberry Pi to the mini USB Port.
On Pi, if I list /dev, I see /dev/AMC0 and /dev/AMC1.
I have few questions:
Rrom Pi, which of these ports should I send dsata to so I can read on VEX V5 Brain?
What Baudrate, Stop Bits, Parity Options should I use?
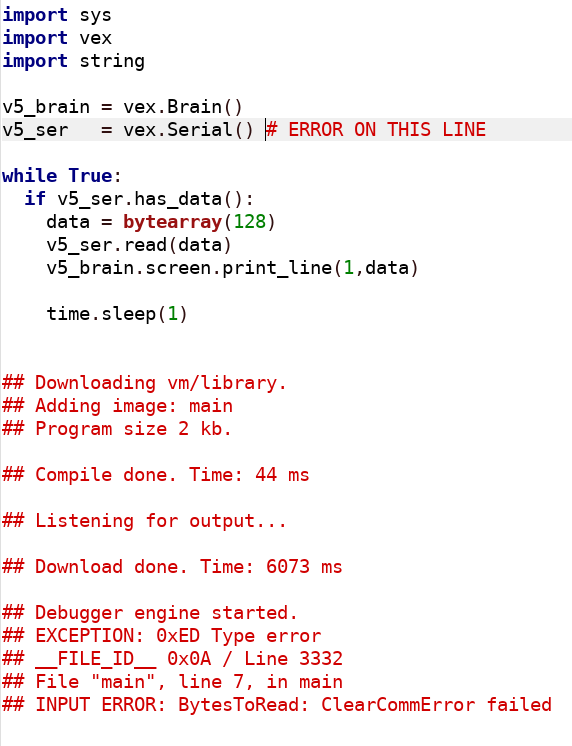
On the brain, how do I read this data using Python?
I have looked at the following link for the API: VEX V5 Python API: vex.Serial Class Reference
def init (self, parent)
def write (self, data, null_terminate_string=True)
def read (self, buffer)
def has_data (self)
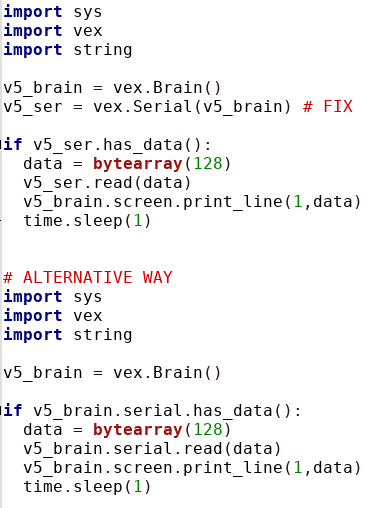
I get an error trying to instantiate vex.Serial()
What value of parent field should I use?
Thank you for the reply.
I am new to VEX or Pi.
I do have some experience with Serial Communication using PySerial on Linux.
Keeping that in mind. what is Qi?
Also, if I set baudrate to something in pi, and send out data on /dev/AMC1, how does VEX synchronize without knowing the baudrate?
Lastly and most importantly, what is the parent field in: vex.Serial(parent) [ def init (self, parent) ]
Hm, very much not the same. There are some similarities but RobotMesh is based on Python 2.x and VEXcode Python on 3.x (full disclosure, I wrote the VEXcode Python VM).
I would say, based on the RobotMesh documentation, you should be using vex.Serial.write etc. directly and not try and create an instance of the class. but as I said, you need someone with more RobotMesh experience to respond.