Any feedback is welcome, I’ll send updates when I finish the cascade lift and when I build irl. (P.s I’ll add odometry pods, distance sensors, inertial sensors, etc)
For the aligners I would mount them lower. All goal types are different heights and have lips at the bottom, so if you put the aligner lower the robot will line up the same no matter what goal it is
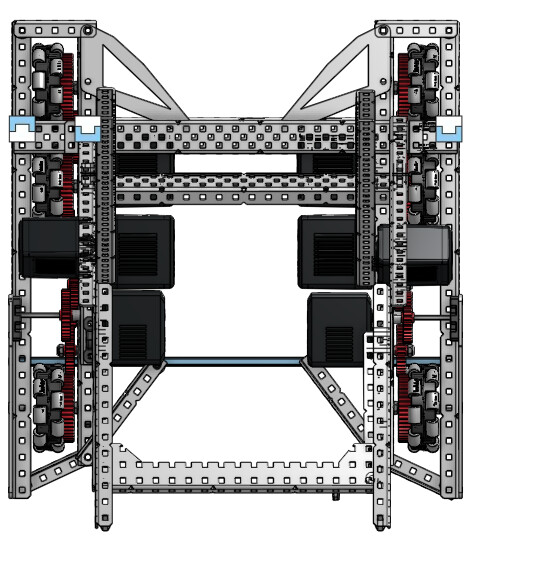
How do you gear your drive train my team has been wondering how we would run a 55 watt drive and this looks like 32/45. We know how to gear up a 360 rpm to 55 watts but not a 450
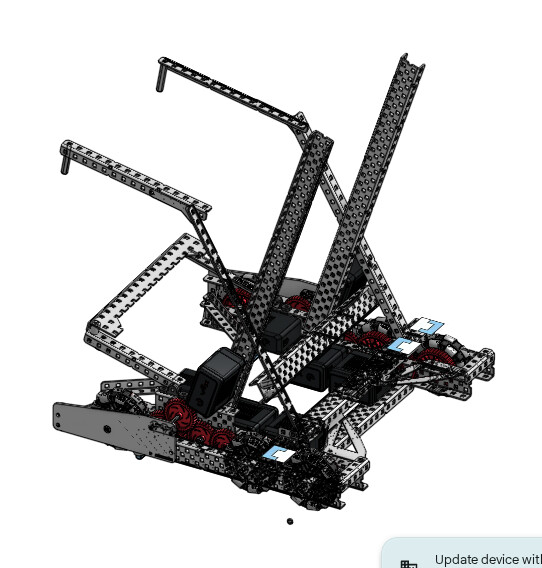
this looks like a perfect drivetrain for override it has a low center of gravity to keep it from tipping and is obviously made for offense good job one question how many watts did you use out of the 55
On the CAD I currently have I used 55 watts on the drive, 11 watts on the intake, 11 watts for the winch on the casacde, and two 5.5 watts for the 2 bar I have to grab matchloads. For anyone wondering how i’m going to grab stuff I’m using a pneumatic claw made out of 4 plastic pieces.
do you think you could share more pictures of this cad i am really intrested in it and no i will be copying because i know some of you think i will the reason i wont is because it is mean and my school doesnt allow me to build until late august
When you build you’ll have to let us know how the one motor winch works out. I personally think it will be too slow but could be wrong. Love the bq, good luck!
I like the aligners, but honestly, don’t waste your poly. We have already been told by several of our sisters teams to save your poly, and just use a bent high strength shaft. Pretty much, we are reusing our one from push back but flipped on our robot.
A bent high strength shaft would made a heavy robot even heavier because I already use 1 for my drivetrain bracing and intake funnel, plus I am within the plastic limit and there’s not really anywhere else I see the need to use my poly for as I already still have 1 piece of plastic left over even after designing everything else, thanks for the tip though!
Honestly, I think it will be fine minus some overheating issues and friction issues that can be fixed with tuning, however I will let you know how it works out, thanks for the tip!