Our bot started as a Moby clone, but then we added two more powered wheels in the middle, so it’s got a total of six 4" omni wheels with the rear two pairs powered directly and independently by four green motors. The problem is when trying to climb a platform, the wheels just keep spinning and slipping. The robot is rear-heavy and the wheels are in full contact with the platform. Where did we screw up?
Being rear-heavy probably doesn’t help on an upward ramp, have you tried maybe going backwards? It might perform better if the weight is forward when going up, best solution overall would be to redirect weight to the center-bottom.
Otherwise torque cartridges in motors can help influence grip, but omnis dont have the best grip of all the vex wheels so it may be worth experimenting with other options.
While there are other options like traction wheels with rubber bands the omni wheels have a surprising amount of grip on the platforms polycarbonate surface. But they lack as much traction on the field tiles as other wheels. Overall I wouldn’t say omni are bad for climbing the platform but I also agree that it is a good experience and learning opportunity to experiment with other wheels.
Actually, they do. When going straight, they literally have the most grip out of any wheel. Their grip only sucks when they are pushed sideways.
Buckle up kiddos, I might learn you something.
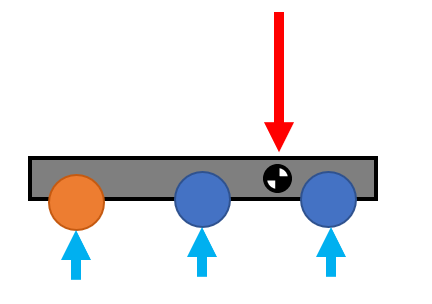
Let’s say the above image is your robot. The fancy looking circle that sort of looks like a checkerboard is to denote the center of mass, or center of gravity (CoG for short). I have also made the front wheel a different color to show that they are unpowered. The rear two wheels that are blue are powered wheels. The red arrow shows the force of gravity on your robot. The light blue arrow are the reaction forces your robot sees when the wheels are on the ground. Remember Newton’s Laws of Motion? Newton’s 3rd Law basically states for every action there is an equal an opposite reaction. Because they reaction forces have to be equal, I have drawn the blue arrows to be approximately 1/3 as long. I apologise if you already knew this, but it will become important in a second.
Right now when your robot moves if has all 4 powered wheels in contact with the floor. All of these contact points will add traction and will make your robot have more torque overall. Heck yes. Pushing power rules!!!
Now let’s look at what happens when the robot goes up the Platform.
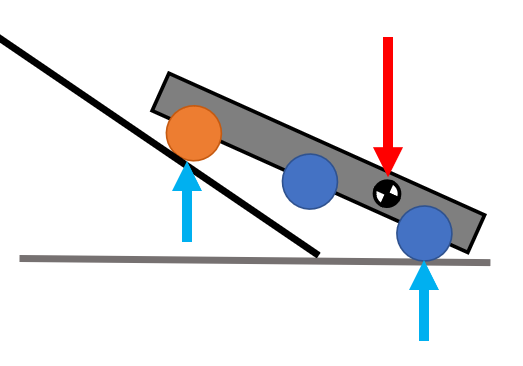
Take a look at those blue arrows that represent those equal and opposite reactions. Gravity pulls down, and the floor/Platform push back up. To keep things simple, I made both the arrows larger and equal. They now have 1/2 of the robots weight a piece. In reality there are more factors that would change the sizes slightly and have the rear wheel arrow larger. But to keep it simple, they can be the same size for this explanation.
Notice that the middle powered wheel has been completely removed from the equation. It doesn’t touch anything! So there’s no way for it to help at this point.
Let’s now rotate the robot so that it’s flat. This always helps me better visualize the forces that are going on. Since I normally stand straight up, up and down make more sense in my brain.
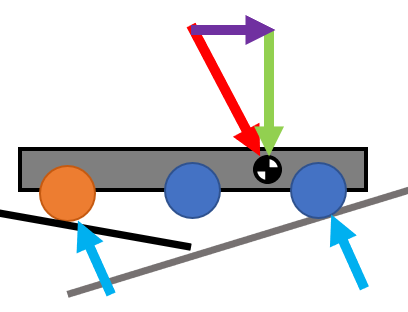
Whoa there Brandon! There’s more arrows now! That’s right. I added those so that we can more clearly understand what is happening while the robot goes up the Platform. The red and blue arrows stayed the same, but I have broken the red arrow into two. The green arrow shows what we understand as gravity pulling the robot down, and the purple arrow shows how gravity is, in a way, pulling the robot backwards,
What if the red arrow was twice as long? Or in other words, what if the robot was twice as heavy as it is now? That purple arrow is going to get much larger. The robot is going to get “pulled” down the platform even more.
Now why did I write this gigantic wall of text? Because I saw it as a learning opportunity I suppose. But mostly because I wanted a full understanding of why sometimes adding MOAR POWER is not always the right answer.
By adding those motors and wheels, the robot’s red arrow got larger, making the purple arrow larger as well. In this last picture I have drawn a black arrow to show that this is where torque is being transferred from the wheels when the robot is climbing.
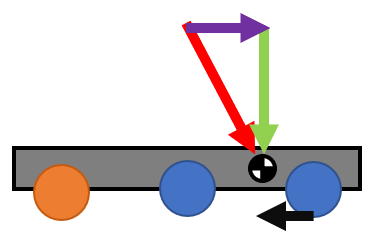
It doesn’t come from orange wheel because it isn’t powered. It only comes from rear blue wheel. It’s pretty easy to see that a much larger black arrow is needed to overcome the purple one.
Hope this made any bit of sense.
Tl;dr: That middle wheel was added to aid in climbing up the Platform. But when the robot needed it most, it vanished.
Sidoti, you’re made of awesome. Thanks for this illuminating and coherent explanation. I hope many teams will read it…! ![]()
Sidoti, thanks for the awesome explanation. Unfortunately, the slippage does not occur until all six wheels are on the platform.
Perfect! I honestly thought that might be the case. If we were in person, I’d try to be a good mentor and nudge you in the right direction until you came up with the reason for the failure yourself.
Since we’re separated by a computer screen or two, I’ll be a little more direct with my nudging.
Out of all of the arrows that I drew in the 4 pictures above, can you guess which ones play the biggest roles in the robots ability to drive up the platform?
I’ll even give you a hint! An unmodified Moby can drive up the platform.
So I went back and watched the Hero Bot Moby video again. Weight is one obvious difference, although ours doesn’t look too overweight compared to some of the bots we’ve seen on youtube that can climb the platform. Moby also has regular traction wheels in the front which according to multiple people on this site don’t have as much traction as omni wheels.
As far as what forces enable the robot to drive up the platform, my guess it’d be the torque coming from the powered wheels (as long as they’re in contact with the platform). I think I’m going to need another clue.
Sorry for the delay, I saw someone had commented, but then removed their comment without me noticing.
What they essentially said was “What is the difference between a wheel stalling and slipping? How does this difference relate to any of the arrows drawn above?”
This is exactly what I would have hoped the next logical question to be asked if we were sitting here playing with the robot together. I’d hope that we could intuitively tell that the big difference between the new robot and the unmodified Moby would be the wheels acting differently.
@ae5880 if you transfer the higher power to the back wheels but also when you do that make a gear ratio that makes less stress on the motor
Whoops yeah that was me. I think I had thought I misunderstood what they were confused about
I wish the wheels were stalling and not slipping. I guess stalling requires more power (= more motors). I guess slipping indicates lack of traction?.. The difference between Moby and our bot is weight, weight balance, # of motors, # of wheels, and the wheels acting differently is a consequence of all of those factors. I’m struggling to make the next step and pinpoint exactly what causes slippage and how to address it :-(.
@ae5880 try changing the back wheels to the basic wheels, omni wheels make less traction but if you went in a x-drive it could work with the omni wheels and if that doesnt work take the basic wheels and wrap tracks from a tank track vex robot around that basic wheel and it might solve you problem
You’re close! I like this! Thank you for expanding on your thinking.
If the wheels were stalling, then you’d be correct, more power (more motors) could solve this issue. But since your wheels are slipping, more power will actually make your slippage worse.
Acceleration can be either traction limited or power limited. In this case, it looks like you are traction limited. The wheels want to move faster than the robot, and results in a sick burnout.

Check out how slow this car is moving. But also try to realize how FAST the back wheels are spinning. If this car was on a 22° incline like your robot is on the Platform, I bet it wouldn’t move forward at all.
Now, I don’t know if we can solve the problem any more using just theory. We have identified some differences between the working robot and the not working robot. We have learned some new concepts like traction limitations. We now have enough tools in our tool belt to make a hypothesis (or many hypotheses) and can now apply the scientific method. It’s time to start testing.
Here’s a short list of the things we know are either different or have been affected:
- Weight & Weight distribution
- Number of motors
- Number of wheels
- Traction on the wheels
Try changing something on the robot that affects just one of these items (weight will be hard to keep constant). Then test it out. Try taking a motor off. Try using a different gear ratio. Try making the robot a lot heavier or lighter.
Test these differences out and that’s how we will be able to definitively solve this problem.
Would swapping the green motors for red ones make a difference? It looks like a less costly option than re-doing the drivetrain.
No, by doing this you will add torque, not traction. Also, you will be driving around the field at half speed.
Don’t say no. Have you tested this? Have you weighed all the potential differences? Have you given it more thought than immediately shutting down an idea because you think it won’t work? Did you give this idea enough critical thought to understand the pros as well as the single con you’ve brought up?
@ae5880 Give the red cartridges a shot. You might find they work. You might not. But you will for sure know, through experience, what changed between the two options. You may find that the wheels spinning too fast caused the slippage. Then you may find that the slower wheel speed lets the robot climb. Then you can make a decision to try and find a happy medium between fast robot and climbing robot.
After all, changing cartridges is definitely
So let’s take the path of least resistance to start our journey to new knowledge.
Not to harp, or be to harsh, but let’s go back to what I said to @9MotorGang… I think there is yet another learning opportunity here.
I have been in the competitional robotics setting for 13+ years. Do you know how many times a fellow student, or a mentor even, had told me a design absolutely would not work? Do you know how many times they were correct in that absolutely preemptive assumption? Well let me tell you through experience that the odds are not in the favor of the one shooting down the idea.
Not to toot my own horn, but:

I’ve had 2 completely independent “That idea will totally not work” mechanisms make appearances on FRC’s equivalent of Freedom Hall. Both times I was told they would not work before we even tested it. But they made it to the finals of the finals. Not too bad for “absolutely not going to work”. One of these robots even walked (drove) away with the Championship win.
Maybe the ideas were bad. Maybe the initial thought was not a great thought. But what came out of it was good. What came from that bad idea was greatness.
I have said this probably a million times. If you have worked with me on a project and have been part of the brainstorming stage, you’d have heard what I’m about to say a hundred times per project. I share this with you because I find this to be absolutely true.
There is a such thing as a bad idea. But I want to hear every single bad idea. Because great ideas are born from a bad idea. More information is always better than less. And if you say something I think is dumb, I will immediately think of a way to make it better. And that’s how the ideation process works.
So if you made it through all my long winded comments on this thread and want a single takeaway from it all. I ask you to remember this:
Bad ideas spawn incredibly great solutions.
A little off topic, but I really want to know, what robots were these and what were the mechanisms?