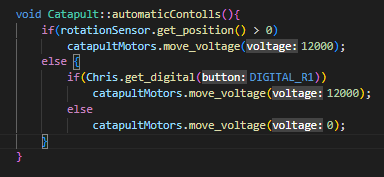
I am attempting to utilize the rotation sensor to pull down the catapult to its primed position automatically. The code works as intended when I start the program with the catapult, not in its primed position. However, if I start the code with the catapult in its primed position, it does not stop. I have both attached a video of the phenomenon happening and attached pictures of my code to this post.
I’m not sure how you are utilizing the rotation sensor unless you have more code elsewhere.
You may want to look into placing this in a separate task so it doesn’t interfere with other robot actions.
//Always run the motor if controller button is pressed
if(Controller1.ButtonX.pressing()){
catapultMotors.move_voltage(voltage:12000);
} else
//If the sensor is pressed then stop the motor
if(IsDigitalR1Pressed){
catapultMotors.move_voltage(voltage:0);
} else
//Run the motor until the sensor is pressed.
{
catapultMotors.move_voltage(voltage:12000);
}
We figured out that the rotational sensor was actually going rather than the absolute zero position. This caused the rotational sensor to read a 3600 for a split second causing the catapult to not stop. Thank you for your time and consideration.