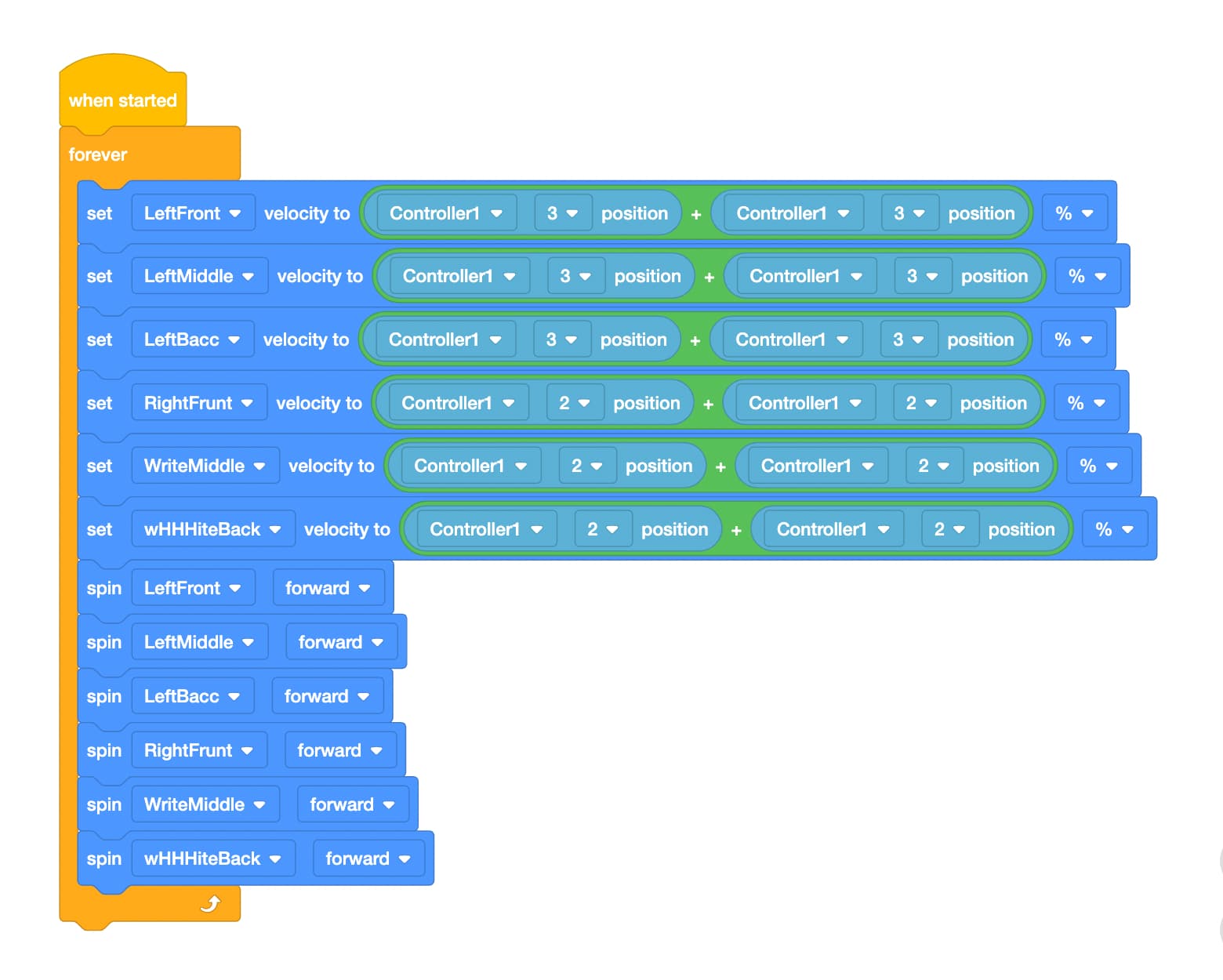
Using the code in the image below, we are having issues getting the robot to operate with tank drive.
The robot will drive forward just fine, but anytime we try to drive backward, it is jumpy. We actually can see some axles moving backward then forward then backward again.
I would recommend setting the velocity of the right chassis motors to the value of the right joystick and the same thing for the left one. Then, say spin forward in the forever loop. This way, if the joystick is facing back, the velocity will be negative 100 wi=hich is the same as moving backwards.
That seems to be OK but I can’t tell why you have the axis values added. In my mind that would give you a lot less control because you would be reaching 100% by the time your joystick was half way up to the maximum limit. I would advise something more like: set Leftfront velocity to Controller1, 3 Position %. Otherwise your code seems to be fine.