Hello everyone!
This robot is a culmination of 2 years of FRC and VEX experience, and is a collaboration with myself, and a Sophomore programmer. Additionally, we followed the idea of thinking outside of what our team normally does, which involves not building defense robots and building a robot which does not have to rely on alliance partners.
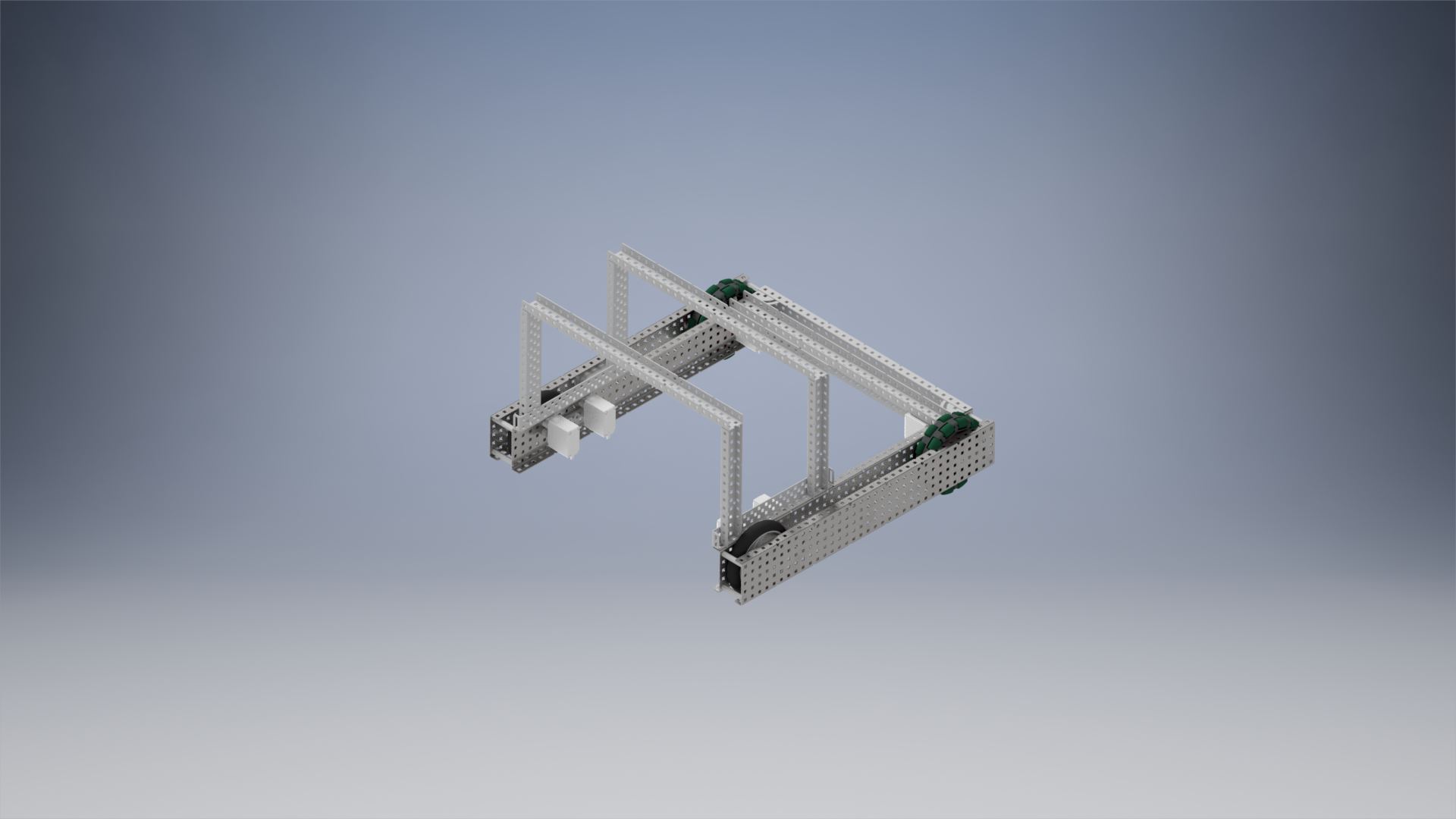
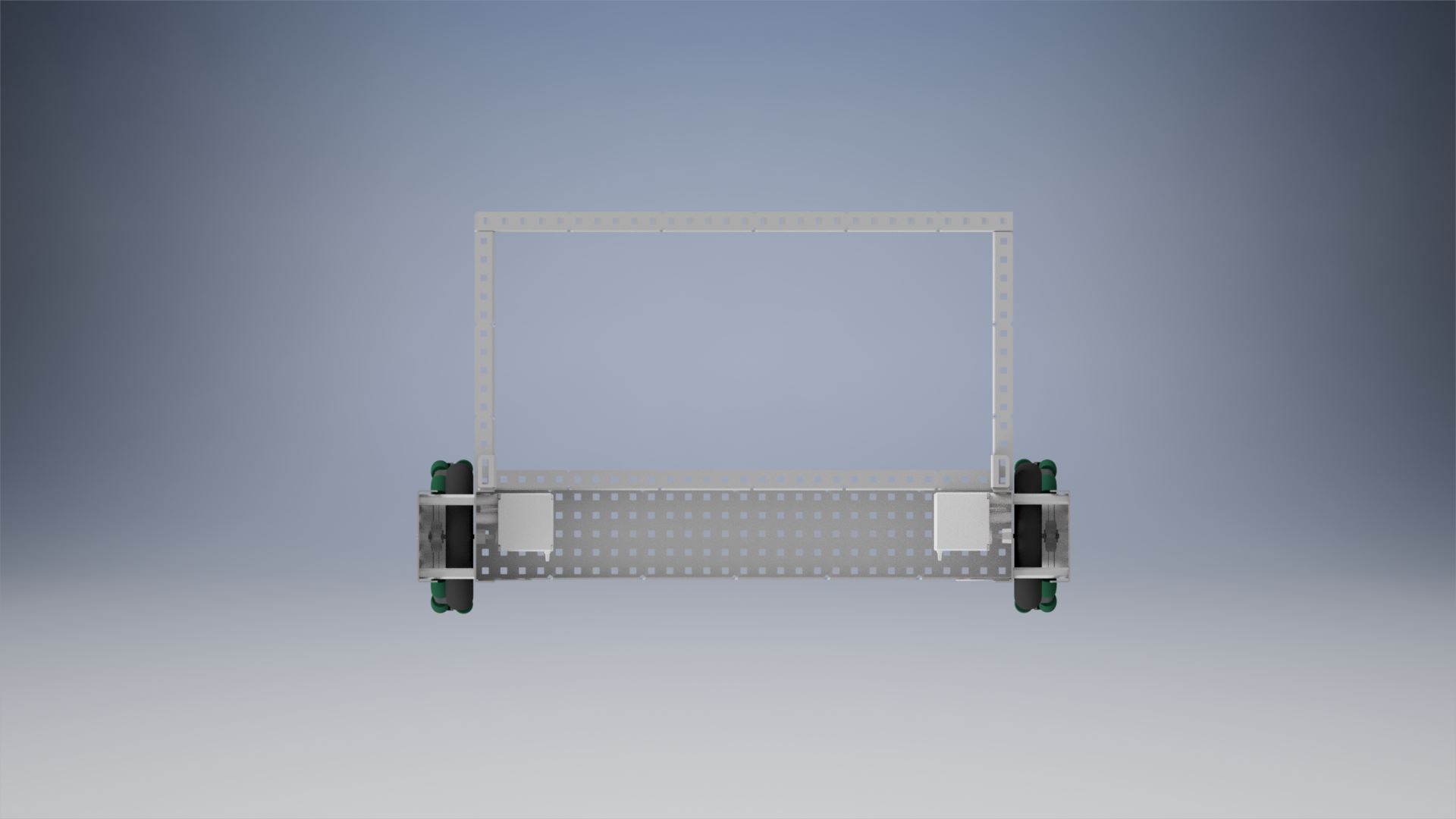
The whole plan is that in Auto, we grab the two closest opposing mobile goals, then try to grab a third, then park in front of the human player loading station, with 3 out of the 4 mobile goals inside the robot and let our partner score our mobile goals.
Will it be Worlds viable? Most likely not, as we only go to local CT events, as we focus on FRC more than vex.
Does it completely rely on our alliance partners to score points for us? Yes.
There are some things missing, such as two extra drive motors for the front, two side walls that extend out forward that will help capture a third mobile goal, a linear door on the front of the robot to contain the 2 mobile goals inside of it, and a brake on the robot to prevent it from being moved at the back. This is because Inventor does not like linear slides and constraining them.
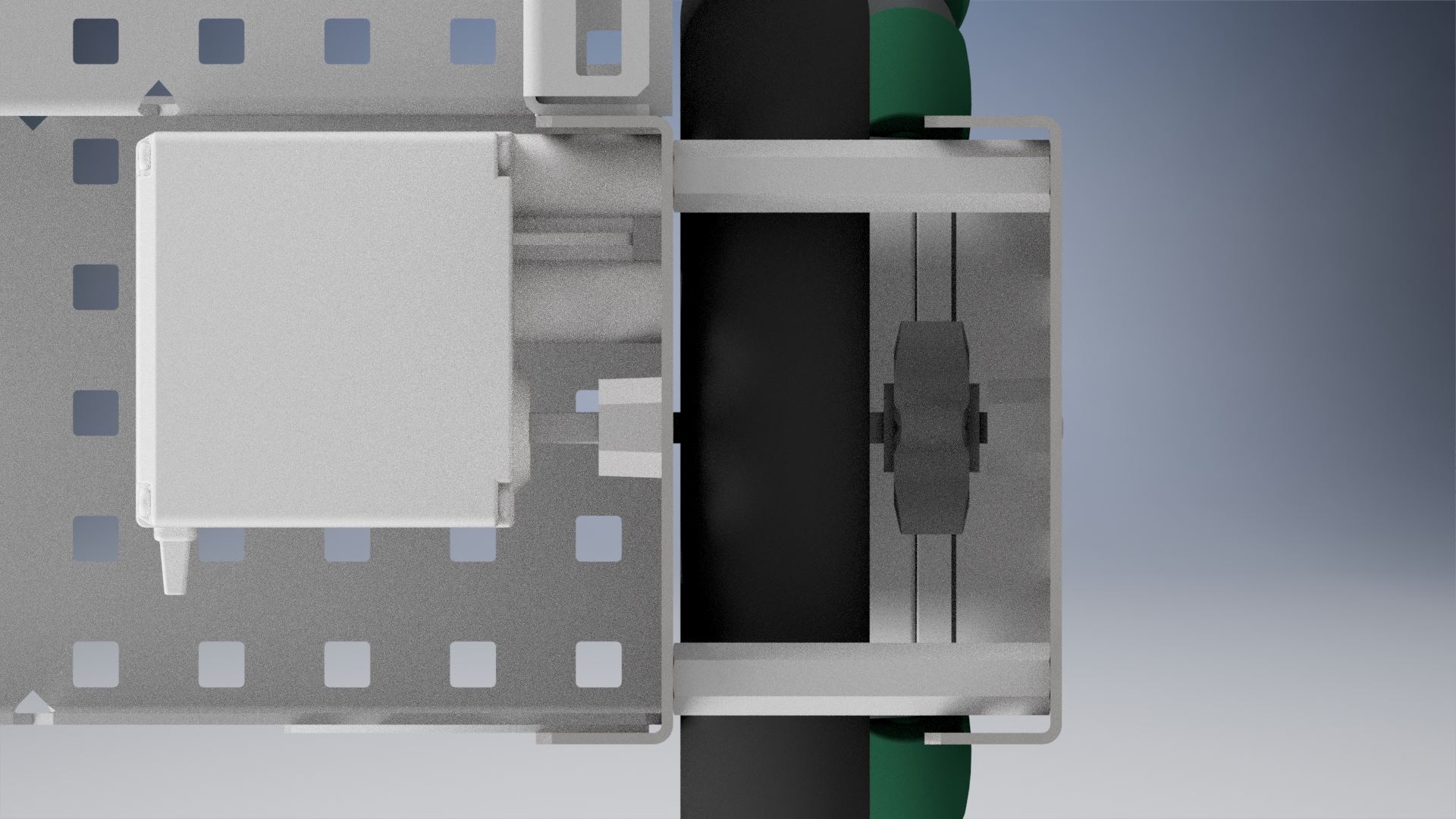
Also, I expect the team to add more structure to the robot for things like the electrical and the linear components. And yes, there are some points where some things need to be cut, such as the metal that the Omni’s rub against and the sprocket sides.
Where does it say we cannot touch an opponent mobile goal in more than one side?
SG6 states that one cannot react to multiple sides of a Field Element, which a Mobile Goal is not defined as. And I do not remember a post stating that, only ones that state that you can envelope a Mobile Goal and can mess with them, as long as it does not violate SG6.
Also, I do not intend on grabbing the Mobile Goals, as it would violate SG6. The robot just drives into the Mobile Goals and keeps it internal. Think about it like those large container cranes at dockyards. Completely Passive intaking.
Hi! Love the CAD it looks great and this is the first proper defensive robot I’ve seen so it’s very interesting.
Just a couple of questions; have you made this robot in real life yet?
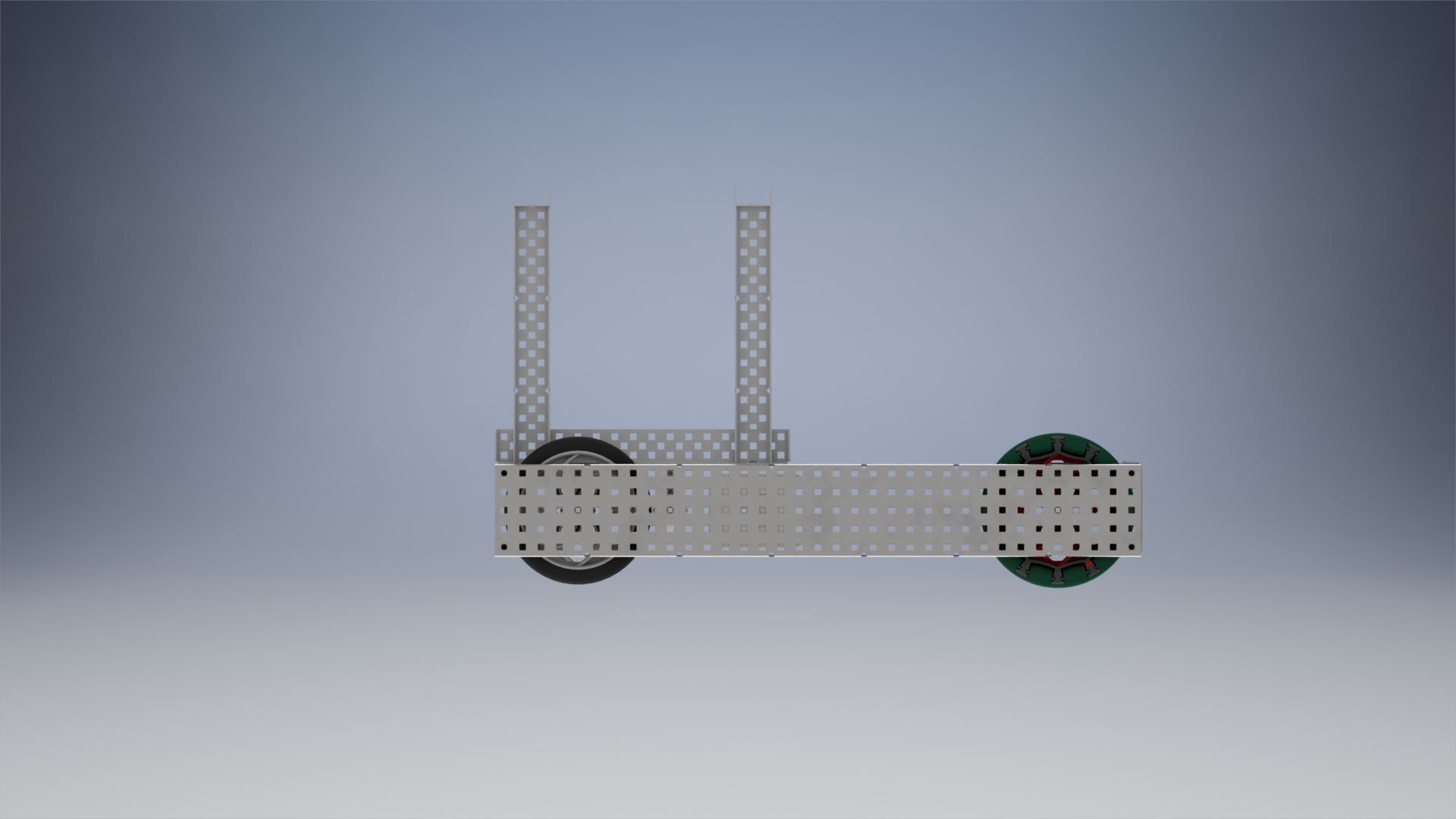
I noticed that the shaft goes through the middle row of holes on the 5 by c-channel. We made something similar (on Inventor) but having measured it we were worried that the c-channel would stop us from getting over the starting bar. So we decided to move the shaft with the wheel attached to the bottom of the c-channel. Although this isn’t the main objective of this robot if you have made it - has it been able to get over the starting bar? Thanks in advance,
Atlantis
No, it will be made when the high school starts up again.
While it is not designed for going over the starting bar, I think it might have the ability to do so. It will have 8 torque motors with a full steel robot, so it quite possibly may, but probably not, as there will be the linear lexan side walls which will most likely prohibit it from crossing the starting bar.
According to the first sentence of SG6, “Robots may not intentionally grasp, grapple, or attach to any field elements or the opposing mobile goals.” Because of this, I think the strategy would be violating the rules unless you were going to just push the opposing goals around. It still could be an interesting strategy. I would just be careful about this rule
Someone will need to explain to me why the game committee would expressly prohibit hoarding cones which there are neutral, plentiful and worth very little but allow hoarding the other team’s, scarce game objects potentially worth 10x a cone. This seems extremely inconsistent with the nature of the game and a decent risk that it will be at least limited by a future ruling.
well, cones weigh about 180 grams, while mobile goals weigh 3.7 lbs, which is quite a difference. Not to mention the 10" diameter that the mobile goals have, which leads to having either a specialized robot to push them around, or nothing. Hoarding goals is a very challenging but also rewarding challenge. However with cones, pushing them is rather easy, and could be accomplished using any robot really.
I don’t see it as more challenging than creating an offensive bot able to score two mobile goals in autonomous (the offensive equivalent). REC typically avoids allowing “choke hold” strategies (or at least they have in recent past).
which has never been done? in 15 seconds scoring 2x mobile goals is extremely hard, not to mention that doesn’t involve creating a specific robot tailored for that purpose
That exactly my point. It’s arguably more challenging to score two goals in autonomous and yet not near the same advantage as taking two mobile goals away from the other team. In years past when a defensive strategy became too offensively restrictive to the other team (reaching too far over the fence, blocking access to the loading zone) rules have been modified to restrict it. I would caution those creating there entire approach around a “choke hold” strategy. As the rules state, ITZ is “designed to be an offensive game”… and defensive strategies that become too effective may be limited to protect the nature of the game (… on is just my opinion).
I do expect that there will be a rule change, if this robot/strategy does turn out to be very effective.
Also, we are trying to get 3 Mobile Goals in Autonomous, not just 2, which will be interesting.
Ask @CHINESEISASIAN about it if you are interested.
Additionally, one the topic of rules against defense, I feel that it was not expected that a team will try to steal 3 Mobile Goals, so no rule was put into place. I feel that it was expected that teams would try to play defense with the cones, so that’s why there’s a 1 cone possession with all the provisions of hoarding and movement through them and such. I also feel that the size limit change from a 48" square to a 36" cylinder was partially changed due to a potential 67" zone blocking defense robot, though I have yet to see an official response that contained that specific reason. We originally had the idea to have a 48" plow to accomplish the same thing, except it was external from the robot. It was then changed to this design, and probably got better as a result.