Hello VEX Forum Community!
So for the past few days I’ve been thinking “Gee, I really should post my design process thus-far onto the VEX Forum.”, and today I’m finally getting to it.
First of all we’ve got a competition coming up (it’s tomorrow, actually) and our team was invited to the 2011 EMC Conference in Las Vegas last month, so we didn’t have a whole lot of time to work on designing and especially building. So, we had to decide on a design pretty quickly, and this was the first one we had that looked promising.
Anyway, onto the thing you all want to see; the pictures. Well, here they are: (Feel free to try clicking the pictures which I posted on Flikr, to get a much better look.)
[ATTACH]4246[/ATTACH]
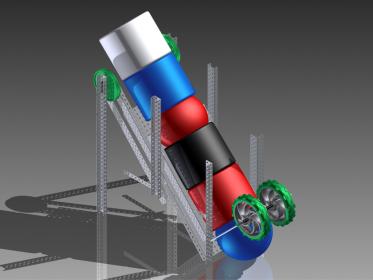
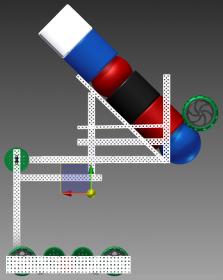
Starting off with our initial design concept, which was very rough, but seemed promising.
[ATTACH]4249[/ATTACH]
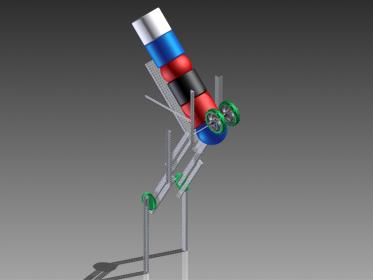
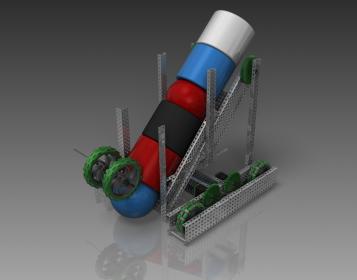
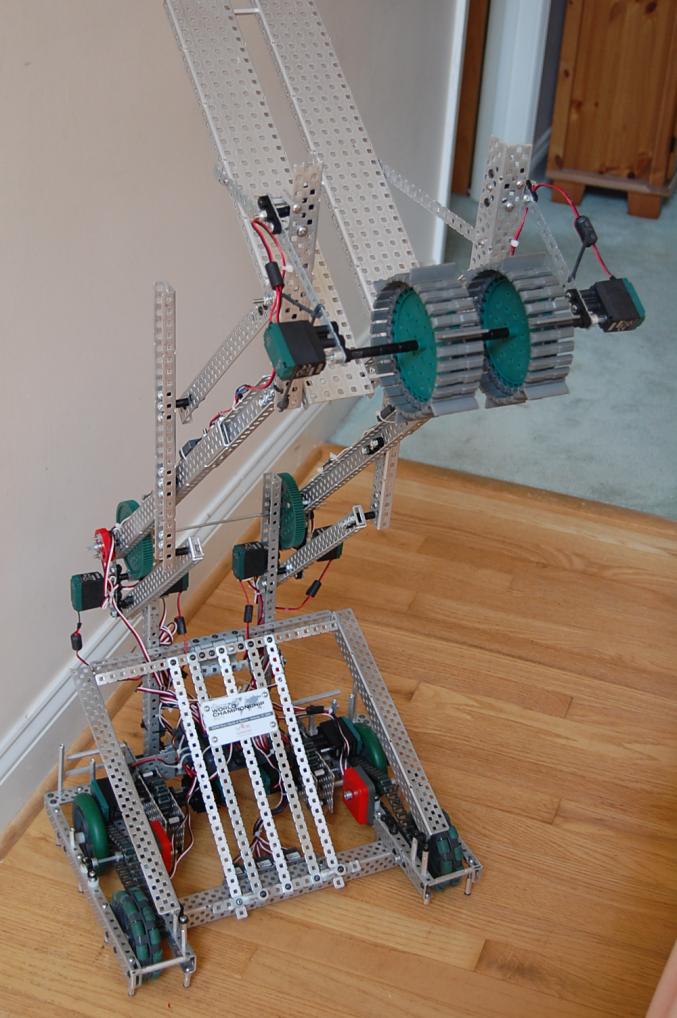
The basic idea was to have an “AURA-style” (seen on their College Round Up robot featured in this thread) 7-bar linkage to raise an angled platform with pivoting wheels/rollers on the front, which would spin to pick up the objects, loading them up the hopper.
[/ATTACH]
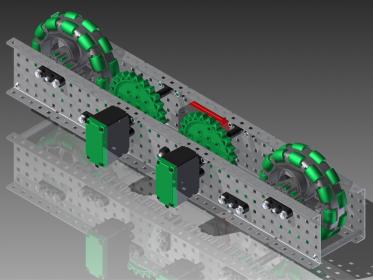
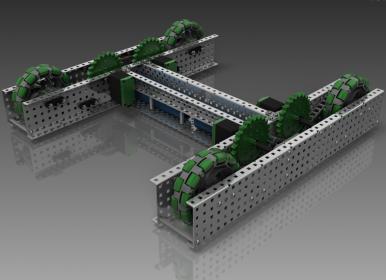
We also had an idea for a drivetrain, and designed half of it in CAD.
[/ATTACH]
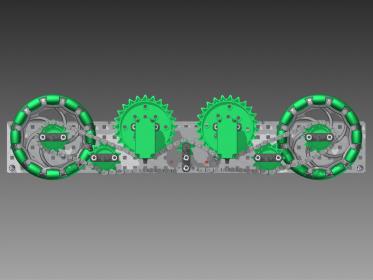
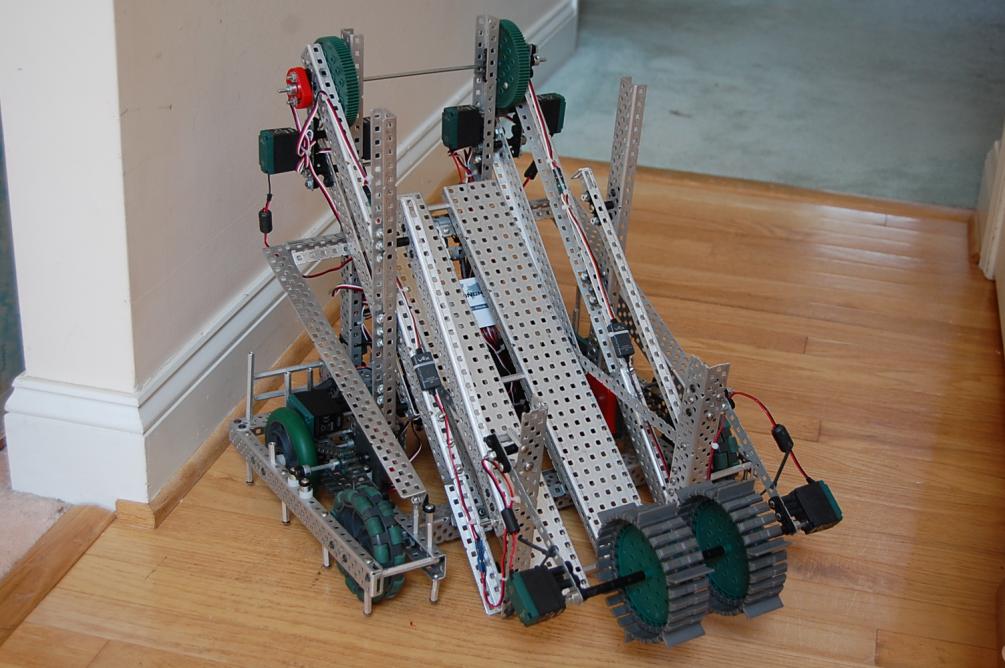
Here’s a better view of the chain run, which was taken by removing the back panel. The gear ratio is a 1:2 (geared up for speed), powered by four 2-Wire 393 Motors.
[/ATTACH]
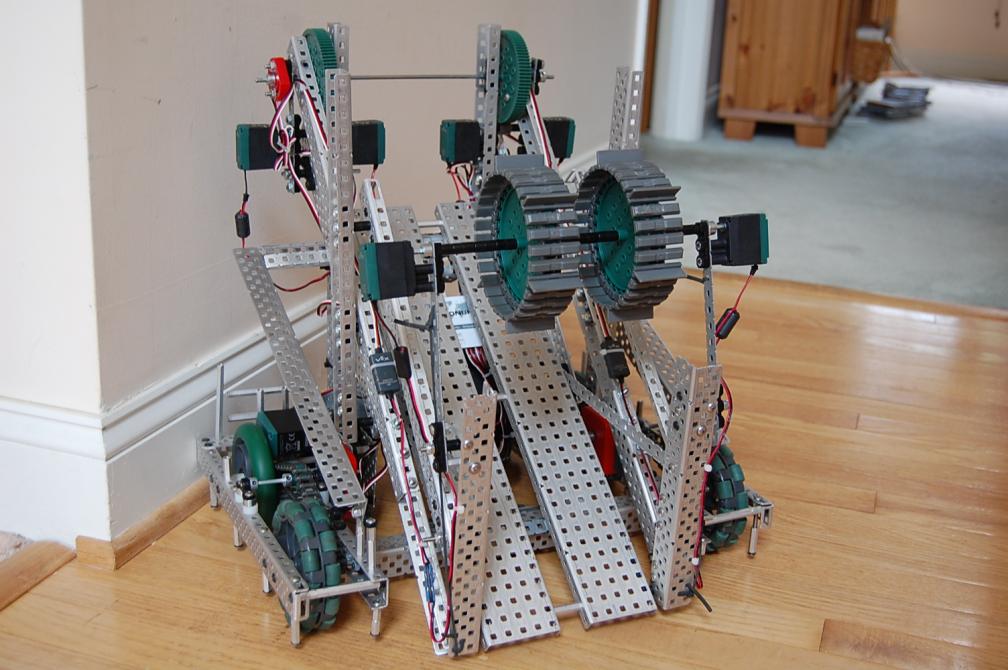
Finally, the pretty picture of the final drivetrain assembly. The two batteries are placed in the very center, and low to the ground, as you can see.
~Jordan