I have made a mechanism for the tilt of a reverse stacker, is there anything better ?
P.S. I know I am missing some bolts on the bearing block.
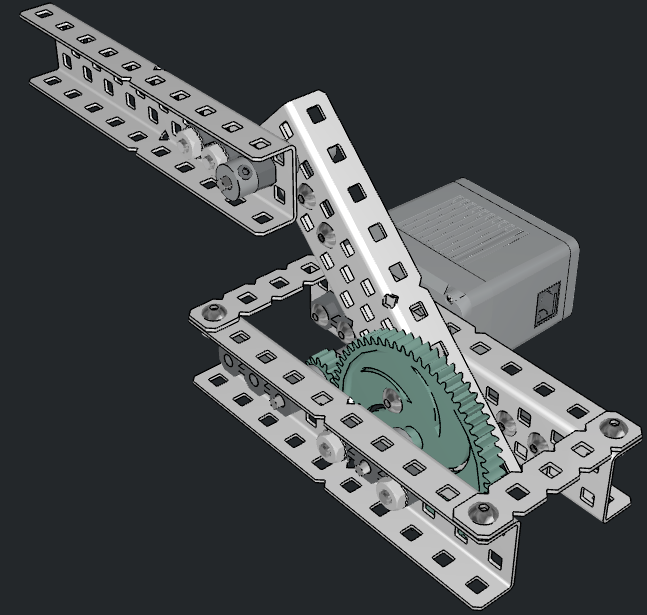


*Is there anything i could do better?
I would recommend using the high strength gears for this because of how much weight and leverage is going to be needed to tilt the stack. Or at the the minimum if you don’t have the high strength hearing I would use two sets of the normal gears one on each side if the driven arm so you increase the surface area for the force transferred.

Yes, this is generally what people are doing.
As a model, that is well done. However, in reality, using those single “one-by” pieces for anything structural is a bad idea. Those will bend easily, causing high amounts of friction in your system. I would switch those out with something stronger, like more c-channel or even angle rail.
I think here a higher gear ratio would be beneficial. We started at 1:5 200 rpm cart, then 1:7, 1:21 (200 rpm cart) and then 1:21 (100 rpm). this can hold an intake, tray, and like 6-7 cubes. The ones before our current design were not able to come out of the intake position, because they were not strong enough for that. Also, there was a large dead zone when the c channel on the gear was not parallel to the tray. dm me if you need help trouble shooting when u actually build, id be glad to help
Use a screw joint instead of a shaft at the pivot point
Thank you I have switched out one for an angle and I am currently designing a base for the rest of the bot. This will make it more sturdy.
you can also make the larger gear a screw joint if the two sides arent too far apart.
Don’t tilt a stack from that low, do it toward the middle of a stack because the torque acting on the magazine storage thing is proportional to the radius away from it. Basically it’s easier to turn something when you’re further away from the turning point which should make sense intuitively.
Also if you do it super low on the stack your tilter will have to move a great distance as opposed to being close to the pivot point
This jumped out at me too. Screw joints are stronger, lower friction, and lower slop. If you’re running the tilter on both sides of your robot, you could even thread a shaft and run it all the way across (shoutout to @Unionjackjz1).
Good luck!
If you wanted to, you could also try pneumatics.