I was able to dig up some data from NbN season, and turned out my memory is not that good. ![]()
We had 3 motor flywheel - two motors connected to ports 1 and 10 and remaining one to MC29. The following table was constructed when only two of the motors were running and the third was serving as the passive load along with the flywheel. Our target RPM for full court shots was 180 (out of max 240 for turbo motors). The test was done with slightly discharged battery but at constant voltage.
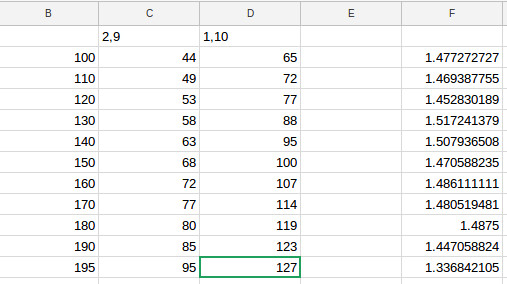
Column B is the target RPM, column C is power required to achieve that RPM when motors are connected to ports 2 and 9, and column D corresponds to motors on ports 1 and 10. Column F is the ratio between power levels on different ports.
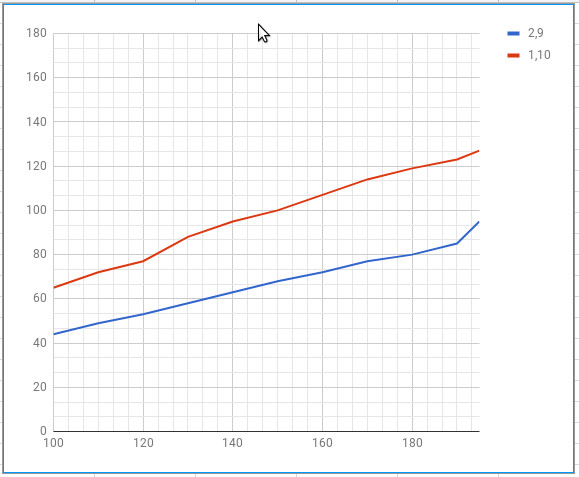
Turned out the motor control value vs output speed were pretty flat under the load:
I looked into our source code and “learned” that we were scaling power level going to MC29 at 1/1.45 of the power level going to ports 1 and 10.