Our team previously used a drivetrain with all gears last year. Anytime we would move one of the joysticks to move just one side or have both joysticks going opposite ways to basically spin around, we had great response/control. This year we are trying a drivetrain using chain and sprockets and our response/control is not very good at all in those scenarios. We get a lot of wheel spin or sometimes it’s sluggish to spin at all.
Is this a know disadvantage of using a chain/sprocket drivetrain?
I tried using a smaller sprocket on the one off the motor and that didn’t make a difference. The robot itself is pretty well balanced in weight, so I don’t feel that’s an issue. I don’t think the location of the motor/ sprocket would affect things based on other robot designs I’ve seen. I will say we don’t really have much issue when driving forward, AKA both motors going at the same time
If you could post a video, that’d help a lot, but from what I can tell and my experience (we nearly always use chain drivetrains) you either have too much slop in your chain, the squares in the center of your wheels / sprockets are stripping out, or both. If the squares are stripping, then use these inside of your wheels / on your sprockets.
Also, make sure that your axles on the wheels stay in the outer support beams on the drivetrain (shaft collars in the right places can help with this).
Again, a video would be really helpful. Good luck this season!
I have the black 2x2 motion ones inside the wheel since that’s the only place I can mount it to since the sprockets I have don’t have holes by the wheels
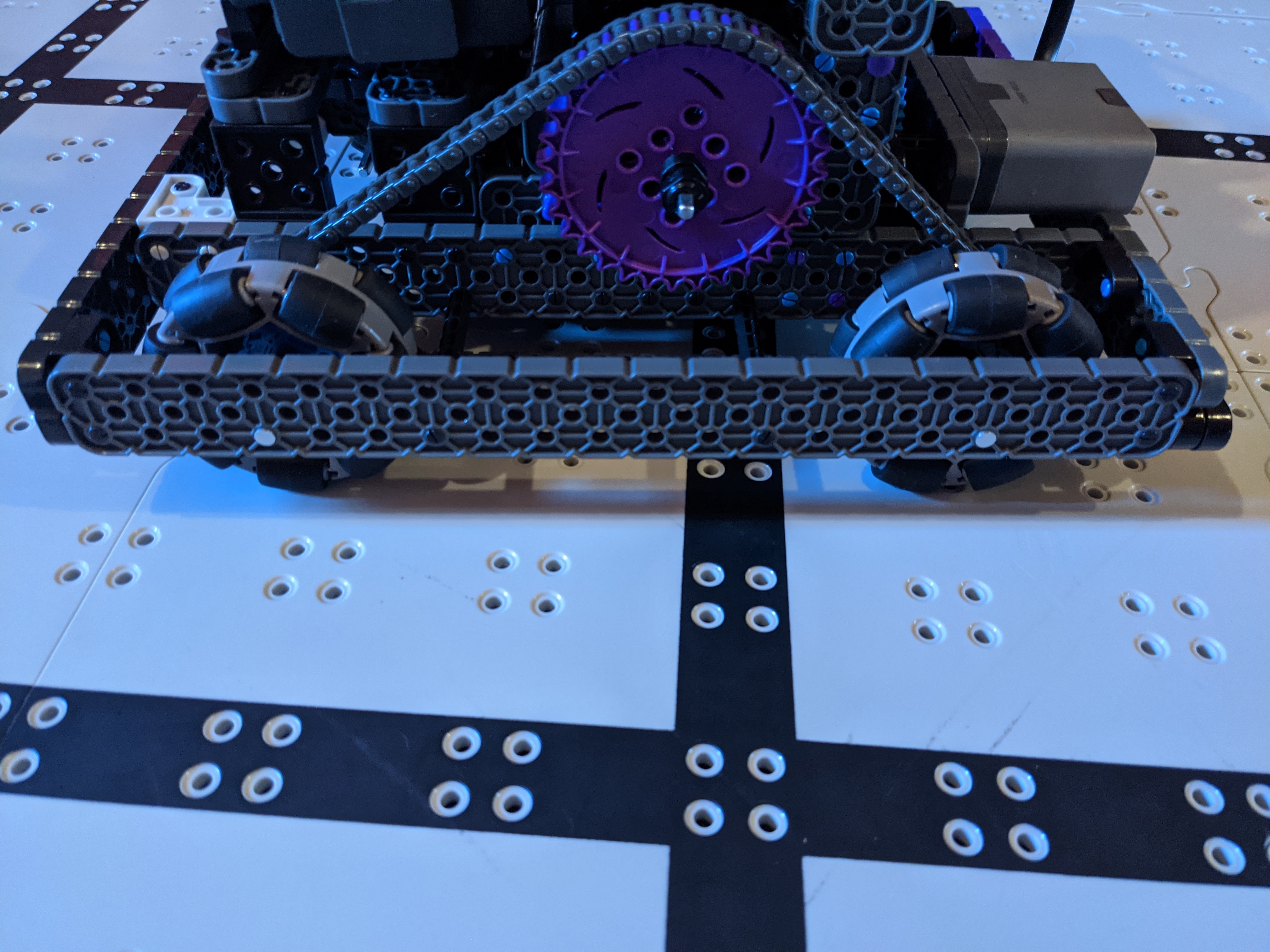
Your problem here is your H-Drive (a picture of the bottom would be great), and not the chain drive. There are a few reasons for this.
First, if your field is on carpet, there isn’t much hope for an H-Drive as the field is uneven. A hard floor is optimal, or you can do what we did by putting sheets of 1/4" plywood under our field on the carpet.
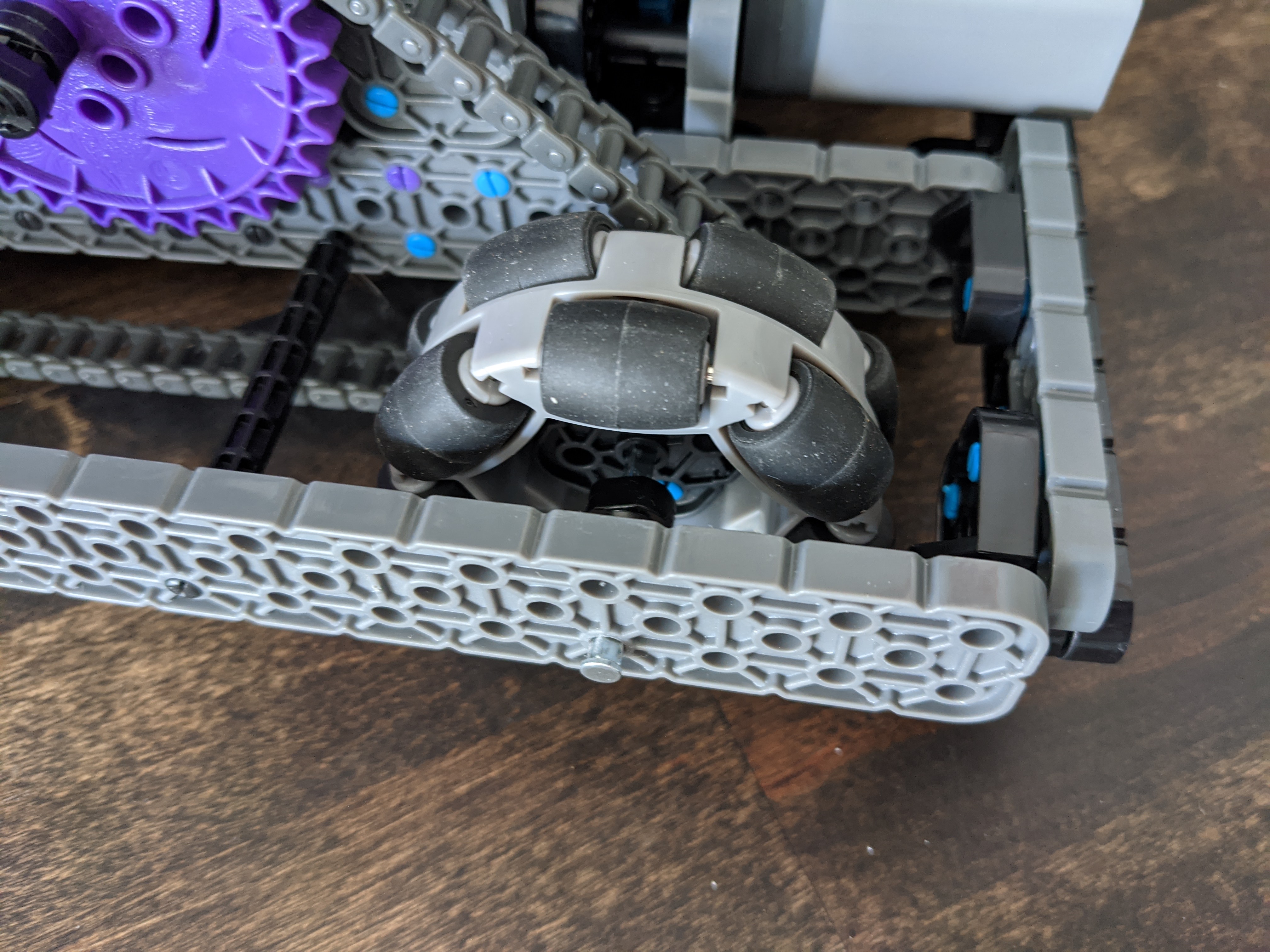
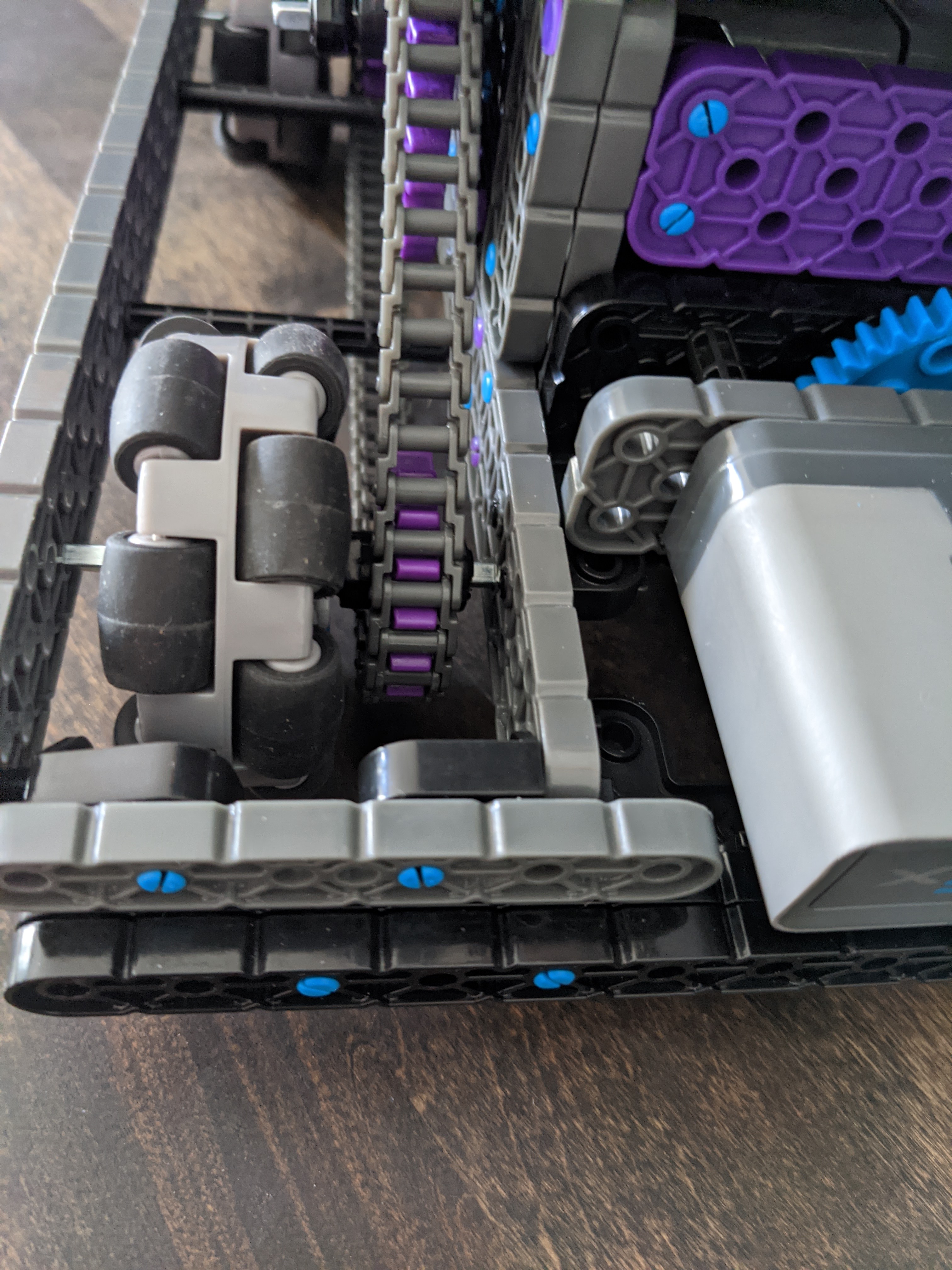
Second, if you have two H-Drive wheels on the same shaft that are far apart, this can greatly affect turning. So try putting them close together or a different configuration. Or try removing it altogether and see how that works.
I hope you get it to work, and just let us know if your robot is still having problems.
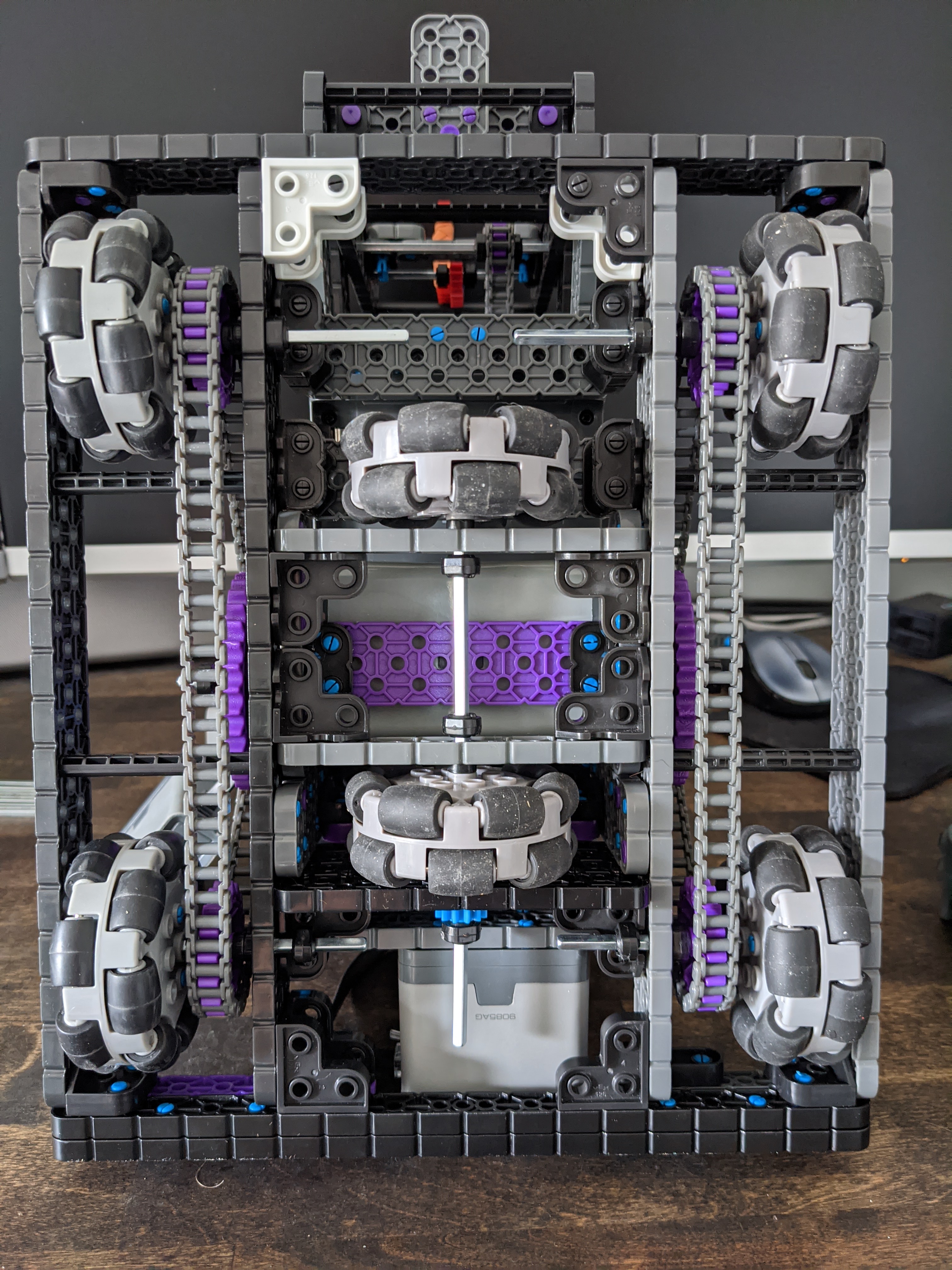
Here’s a picture of the bottom, nice guess work on the h drive with two wheels, you definitely can’t see that from the pictures. The thought process was two wheels for the h drive would give us greater power and grip versus one when going side to side and it does feel better with two wheels than one based on some tests we did before. But if the two wheels are that big of a difference in affecting turning, might have to drop one.
Someone uploaded a practice video on YouTube the other day and it’s an X Drive and they are able to power the lift with one arm and then the razor claw the other. You can clearly see the speed they are able to go side to side to push the risers in. It’s too bad it’s so hard to code for the younger kids or otherwise that might be a great idea over in h drive
It was the video that gave away the two wheel H-Drive. Nice work overall on the drivetrain. Try removing the H-Drive and seeing how it performs, just as a test, and then you can figure out what works for you, 2 wheels on the H-Drive, 1, or none.
I think that unless you do an X-drive / kiwi drive correctly, it can be a disaster, but I am not sure how hard it is to do it correctly. You’re right, it is also hard to program, which is one of the downsides of it. Another downside is that is takes 3-4 motors, but the gain could be worth the sacrifice, depending on the game and what kind of robot you have.
You have to look really hard to be able to tell, but almost certain it is, especially since there’s only two motors on top and the fact his side to side movement was as fast as his forward movement
That robot is really good in skills, but I think that the real power of a robot is in teamwork, and this robot will be less good in teamwork because it doesn’t have a way to pick up three risers at a time to put the bottom one in the goal. They aren’t up on the lip in teamwork, so they don’t slide in consistently and you need to pick them up a lot of the time. I don’t know if this is true, it is just a hallucination, but I am interested to see how it performs in teamwork.
Just to close this off, the issue with turning was because of using the two wheels for the h drive. Going back down to one wheel for the h drive worked to restore turbo. Thanks!