I’ve been playing around with the new v5 block programs, and it’s pretty nice. However, when making the driver control for our team, I came across many issues. So now, I’m pretty stuck–and this is the worst thing that can happen two days before your next tournament.
I decided to ask the masters.
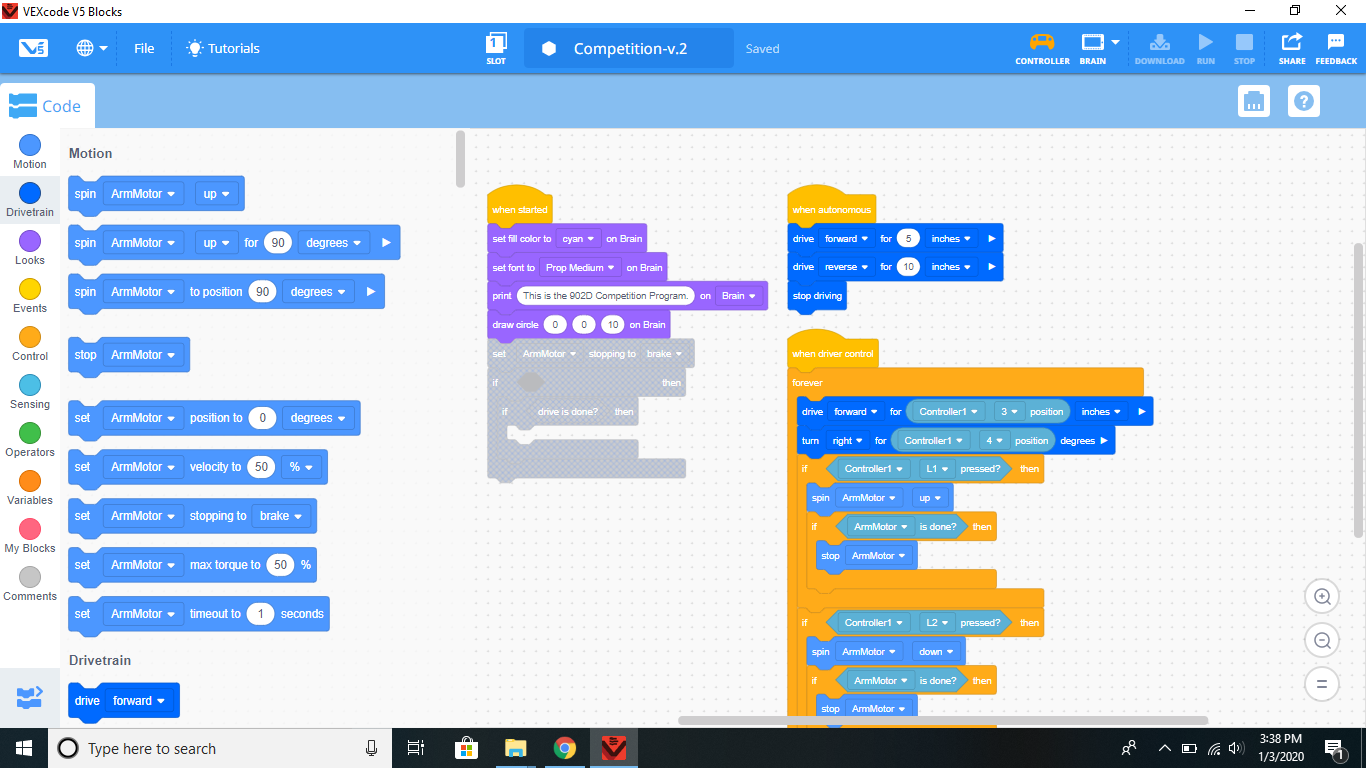
We can’t combine the set turn velocity block and the set drive velocity blocks. What I mean is that when they are together, then the robot’s movements are jerky and uncontrolled, and it’s hard to even move the bot just a few inches forward.
So…can you all help me with out driver control?
Can I see your whole code? It might be something else making your robot jerky.
Are you using drivetrain?
Are drivetrain blocks, but I would not reccomend it, as there are better ways to do all the functions it provides. Also, are you using the new inertial sensor for autonomous?
Wait, what are you talking about?
VEXcode V5 Blocks - "Device Setup - Controller" Tutorial - YouTube is your code based off this video because I feel this is the easiest way to do drivetrain code in driver
You need to set the velocities to the controller positions and then spin them forward.
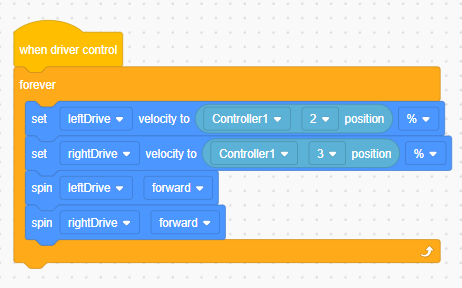
I would not use the drive train.
Also your “if ArmMotor is done, then stop ArmMotor” block is not going to work. It will only stop if ArmMotor is done, but you never had any code to make ArmMotor stop spinning, so it won’t stop.
Oh, okay. Thanks for the help!