I am using the vez cortex to run a simple motors on and motors off program. It works fine as long as it’s hooked up via USB cable to the computer. I need it to start and stop on its own as soon as I turn on the power switch. Can that be done?
Yes. Are you coding in ROBOTC? In one of the menus, you can choose USB Only, VEXnet & USB or VEXnet only. Choose USB only.
VEXnet & USB gives it time to connect to VEXnet before timing out.
Terminology may be a little wrong there, been years since I used ROBOTC, but if you have a play in the menus you’ll find it.
Thanks, and you have a good memory !!! Yes I am using ROBOTC. I have found the “USB only” from the drop-down menus at the top of the page. Thanks.
So now, according to what you said, I should be able to just turn the Cortex on and the program will start and stop automaically?
Please advise and thanks in advance!
Correct.
In VEXnet & USB mode, the Cortex will try to establish a VEXnet connection before running. After a while, it will time out and run anyway.
In VEXnet Only mode, the Cortex requires a VEXnet connection to run the program
In USB Only mode, the Cortex will run the code without trying to establish a VEXnet connection, so will start running as soon as you switch it on.
That worked. Thanks. Also I am needing to write a program that slowly increases rpm from 0 to30 RPMs. Do you know what that code would look like? I’m not having any luck.
Send a small value, then wait a bit and send a larger value. Repeat
I tried that. It will not progress through the entire program and stop (like I have it programmed to do so). It goes to the first RPM value then stays there until I have to manually cut off power to the cortex. That’s the only way to get it to stop. Any ideas?
You should post your code.
Pleaee post your code so we can see what you have tried.
ok, how do I post my code? just cut and paste?
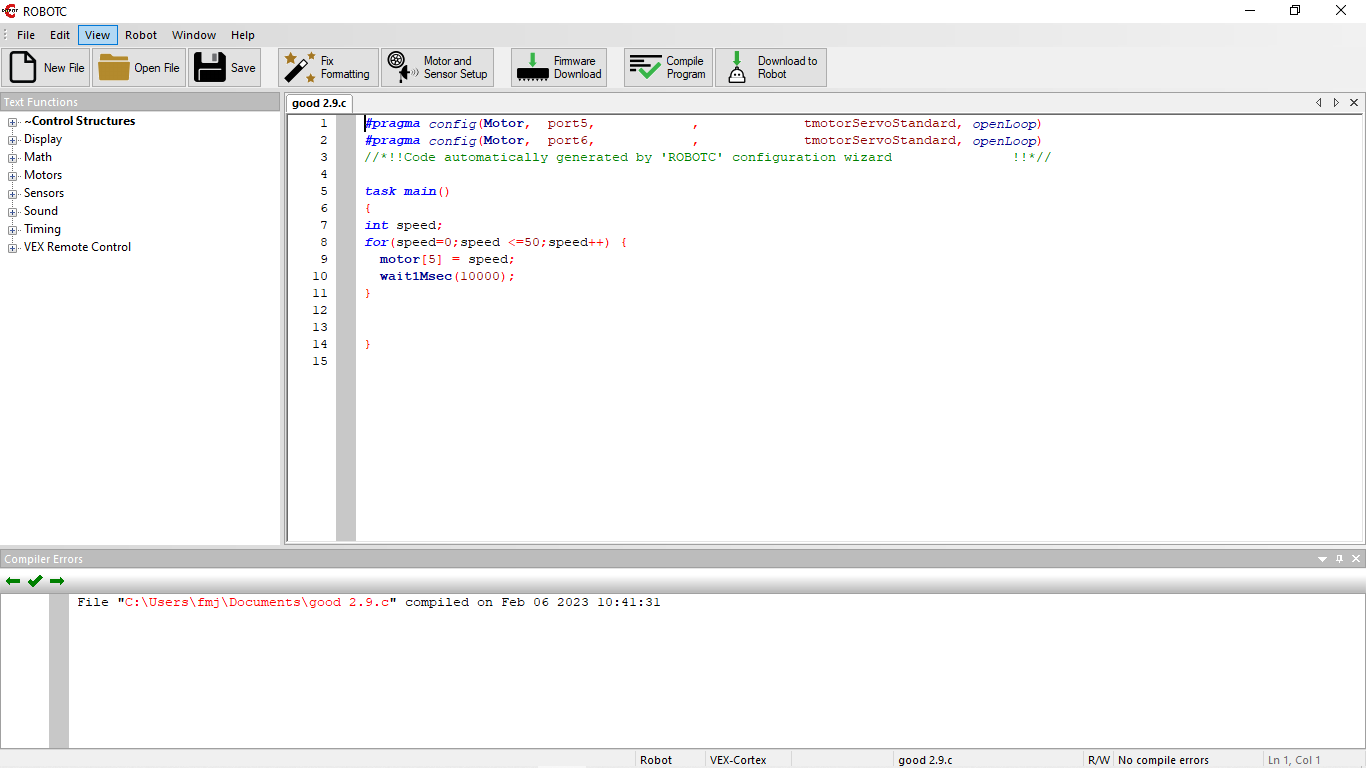
That looks like it works but 10,000 Ms is 10 seconds and be motors don’t start spinning right away so you likely need to wait a while minute before you see movement.
as soon as I hit the power switch, they start moving full power…no ramp up.
You said in the other topic that this is a savox servo modified for continuous rotation. It sounds like either the modification was done incorrectly or the servo is incompatible with the cortex in some other way. Not sure there’s much else we can do to help.
Yeah, itr must be an incompatibility issue bc it works when I had it hooked up to my pololu micro maestro and a servo board. I had to move away from that set up bc the microcontroller only had a limited amount of pins to work with.
This savox Im using is a brushless servo motor set up. Do you think that might have something to do with it?