Robot in 1 week")
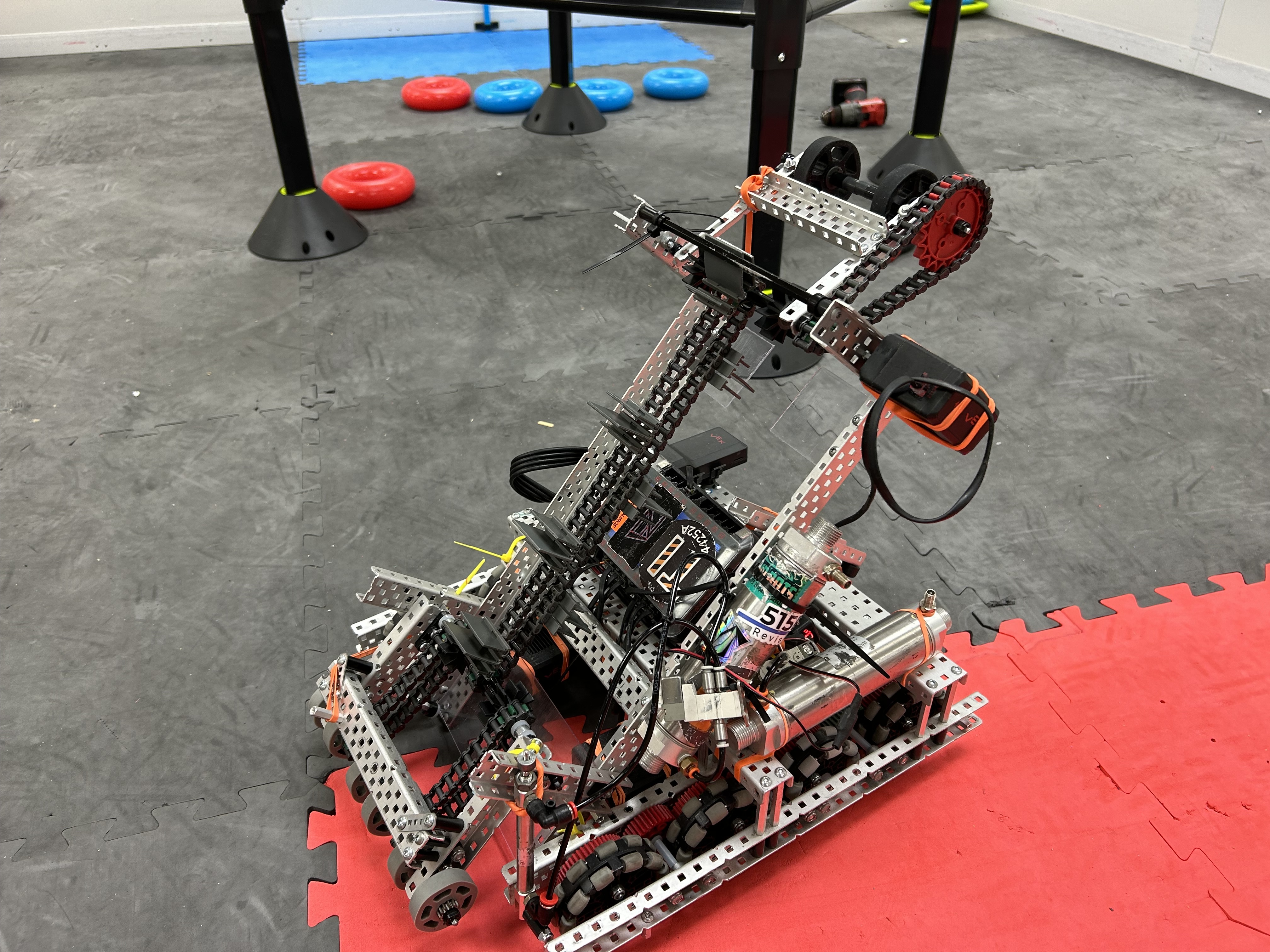
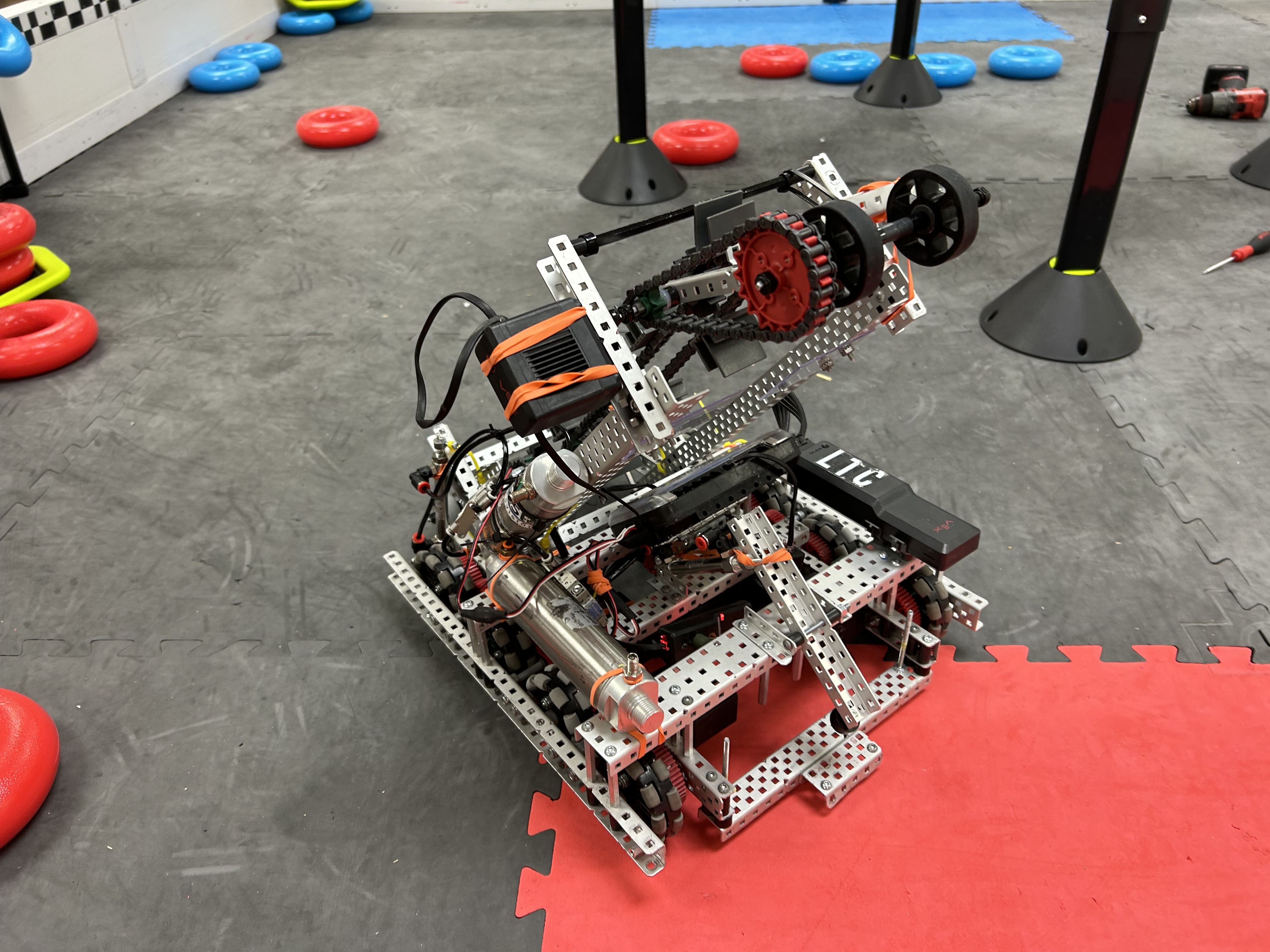
This is the first official robot of the season(that’s public and that we know of)
Please be sure to ask any questions you have about the robots design ![]()
Can your robot remove the rings in the corners at the beginning of the match
We don’t have dedicated mechanism for it since our intake lift can only grab stacks of 3 but we could easily knock it over and grab them
This thing is a beast for how early, two things though. A you seem to have trouble getting the ring onto the stake, B can you do either of the wall stakes
oh,ok. Thanks for the response! Just another question are you guys gonna add a climb later on?
Do you have any way (or any future ideas) on how to score on the stationary neutral stakes?
Yes we will probably add a passive hang mechanism activated by a piston
The start of a meta. I’m looking forward to seeing a bajilion teams in my country building this bot. Great start btw ![]()
Just a suggestion: add some supports at the end of the intake.
Im pretty sure Stratford robotics made the first official robot of the season. they made theirs in 24 hours

This is the first working robot of the season with game elements. Theirs was more of a concept bot and in the middle of the video they use a intake clip that was from us lol.
Yeah we kind of rushed the build of the robot so proper bracing was not done. But we have fixed it and mounted the intake on screw joints/triangle bracing.
I notice that the drivetrain uses 17.5" c-channel giving you 0.5" of clearance. Do you use some kind of passive expansion at the beginning of the match to allow the intake to extend?
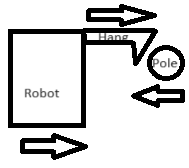
At the end of the match, if you want to have a hanging mechanism, I would advise you to use a momentum-hang climb. This takes no motors.
If you want to know what I mean, this is it:
The drivetrain runs at full speed to the hanging pole, and uses that to make the robot move upward (a ramp in physics):
Yes the intention of the design is to start with the intake folded up within the 18 inch starting limit.
Their drivetrain is 30 holes => 15 inches long, allowing them an extra 3 inches of clearance.
It’s actually a pretty good idea if you don’t want to waste motors on climbing. This is a video of our old Over Under design (not the highest quality tho). The only problem with momentum-hang is that it requires high speed, meaning you should have a strong enough base regarding the weight of this year’s robot
How wide is your drive train and also how big are the wheels?
Hello Sir,
I am a ninth grade student having a high stakes competition at my school and I would appreciate some help. After careful consideration me and my companion have decided that this design is one of the best, and we would love to be able to incorporate this design into the competition. If you could explain what you used and how you built the robot, or better yet instructions and even more precise and utile advice, we would be flattered.
Thank you very much for any eventual help,
Martin and Mauricio