I need help building a flipping mechanism for my stacks. Currently, we have a conveyor that can pick up pins and stack them, but we are unsure how to flip the pins.
Pneumatics. Might want this kit too if you don’t have the parts Gear Add-On Kit - VEX Robotics
Thank you so much for the help. @argonbeam and @76782AHighVoltage
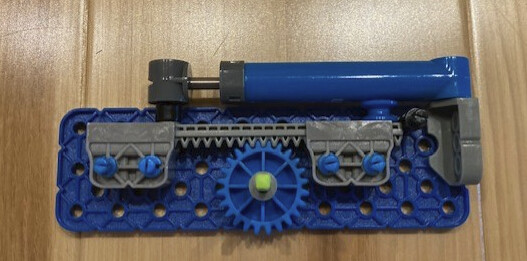
You can see from my son’s basic mechanism that there is a single, central axle doing the rotation work. If you are trying to flip something heavy, that can be a lot of load on the axle. You can use turntable pieces to better distribute the load if trying to flip something heavy. These pieces are not part of the standart IQ kit, or add-on competition kit. They can either be purchased from VEX as a packet, or are found in several of the HEXBUG Robotic kits available for retail sale.


Not to derail this, but @bkahl can you post a few words about the drive train? It looks like the front has swerve?
Hey -
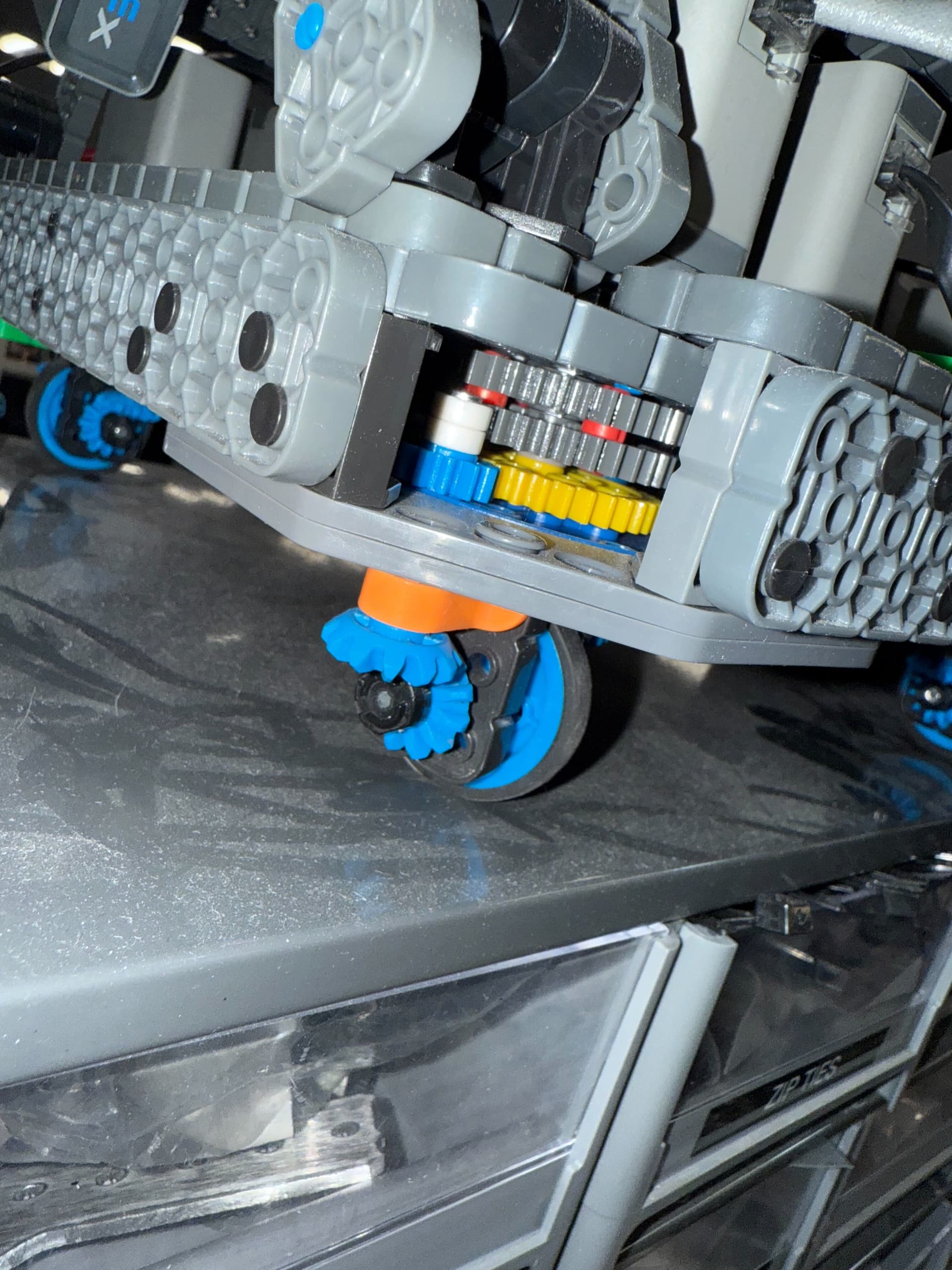
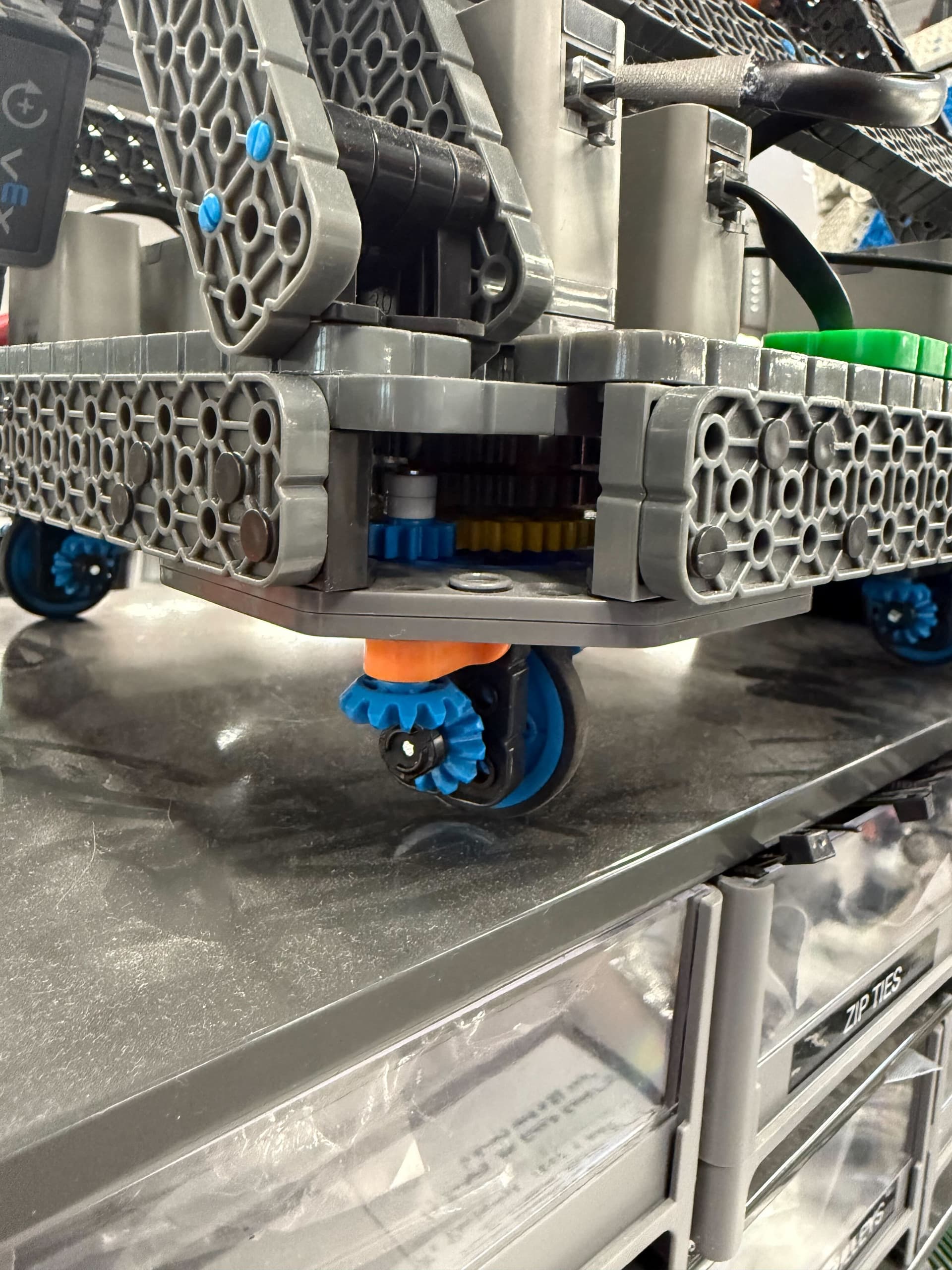
Yeah, this robot uses differential swerve drive on the front. The robot was made for a trade show demonstration, and we decided that swerve might be a cool thing to show off. It was subsequently modified to demonstrate IQ Pneumatics for that video.
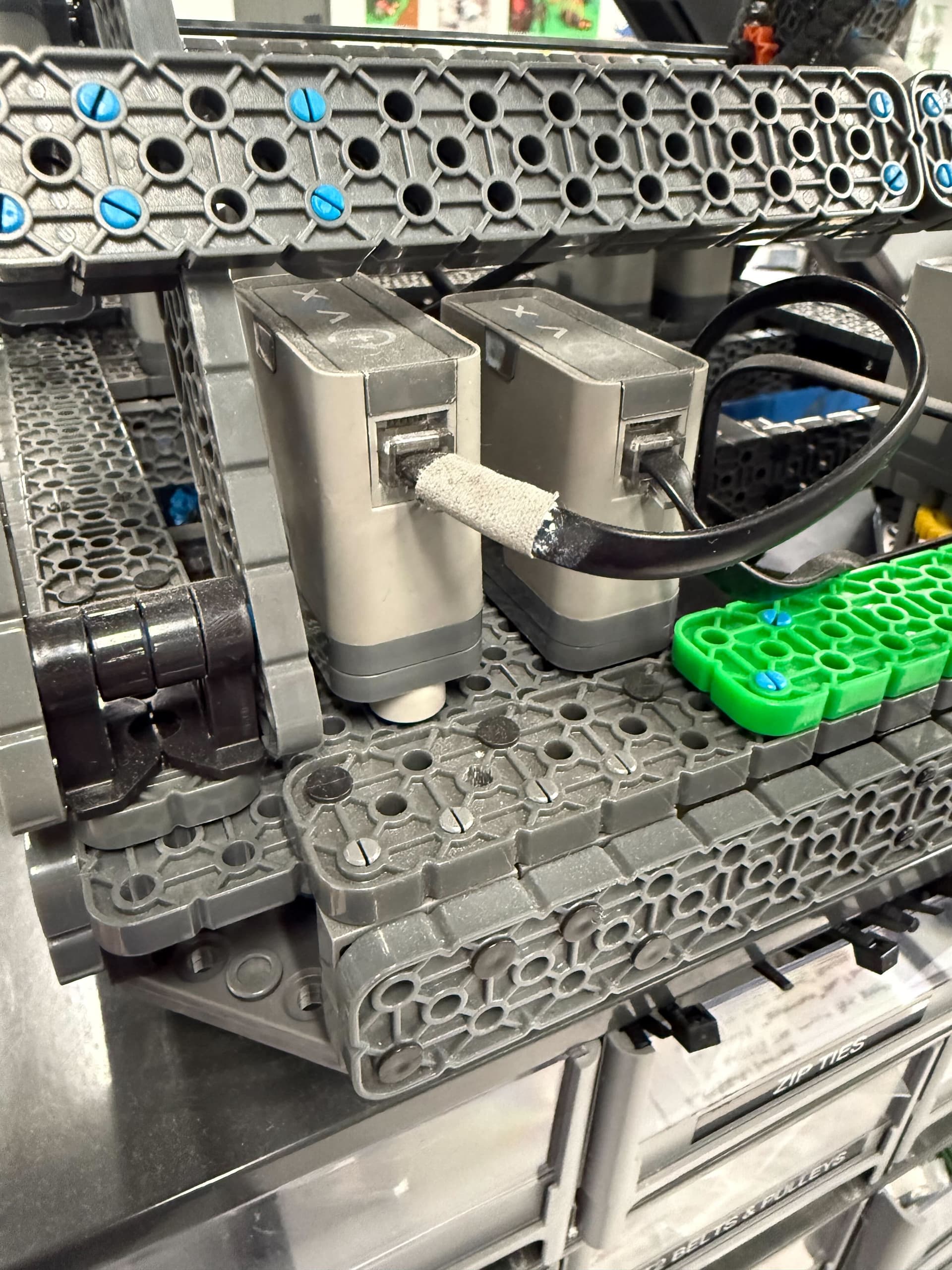
I can’t find this robot in the office right now (it might still be packed away with trade show stuff in the warehouse…), but I have another robot that uses similar differential modules. Its modeled after the 2023 FRC 148 Robot that a few of the VEX Engineers helped with as coaches on the team.
Swerve modules & both robots were designed and built by a former VEX Engineer, Noah Agnew (@N0ah , but I doubt he’ll see this ![]() ). Everything on the robot, including drivetrain, elevator, elevator pivot works. There is not an intake/end effector mounted, but power is run to the end of the arm for whenever its done.
). Everything on the robot, including drivetrain, elevator, elevator pivot works. There is not an intake/end effector mounted, but power is run to the end of the arm for whenever its done.
One day I’ll finish the end effector on it, and maybe print out some scale game pieces for it to play with…
Here are a few pictures of those modules & the robot:


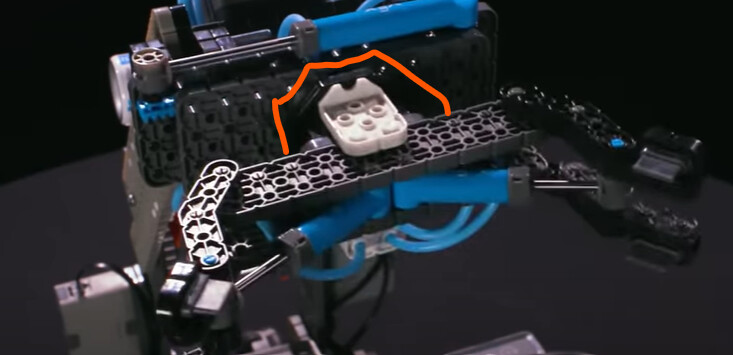
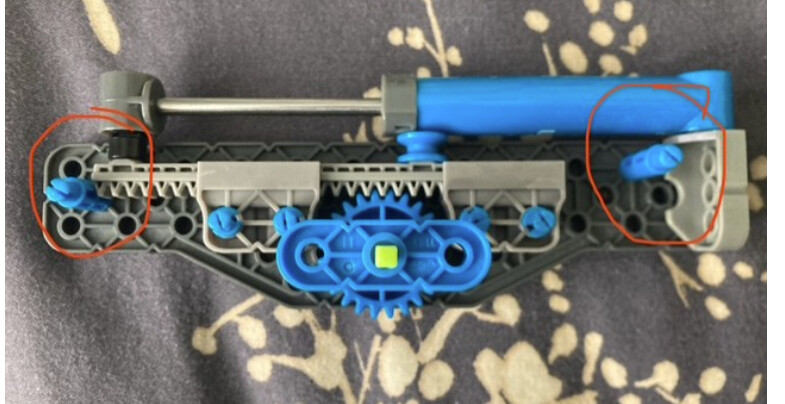
My son watched the pneumatics teaser video and immediately noted the rotating claw and wanted to try it for mix-and-match. One thing he noticed while watching the video the first time (I didn’t) was the slight over-rotation of the claw on extension. We discussed whether this would actually make a difference (Socratic method stuff) and he concluded no. But it bugged him. So I told him to figure out how to fix it. He had already figured out how to limit the retraction of the pneumatic cylinder by carefully watching the video and noting it didn’t fully retract. So he then went about trying to limit the extension as well. The pic is not of the final version - this one was hard to mount to the lift arm the team originally built and they use different parts now. But it shows the solutions, circled in orange.
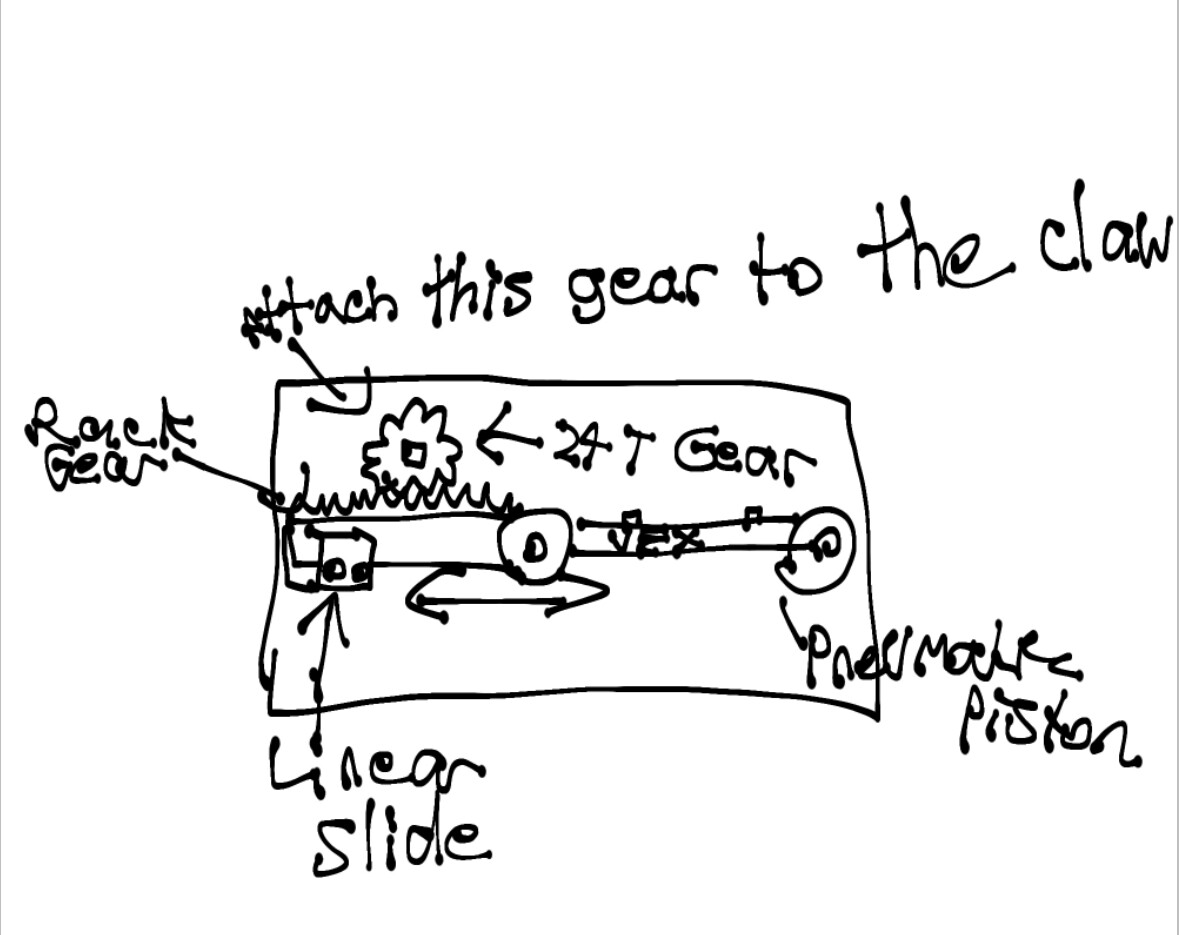
Attach a claw or other mechanism that can grasp the pin, then use the 180 degree rotation devices noted above. Can use pneumatics, as shown, or a motor programmed to rotate however much you desire it to.