Hi everyone!
I have built a “seesaw” robot for this year’s competition.
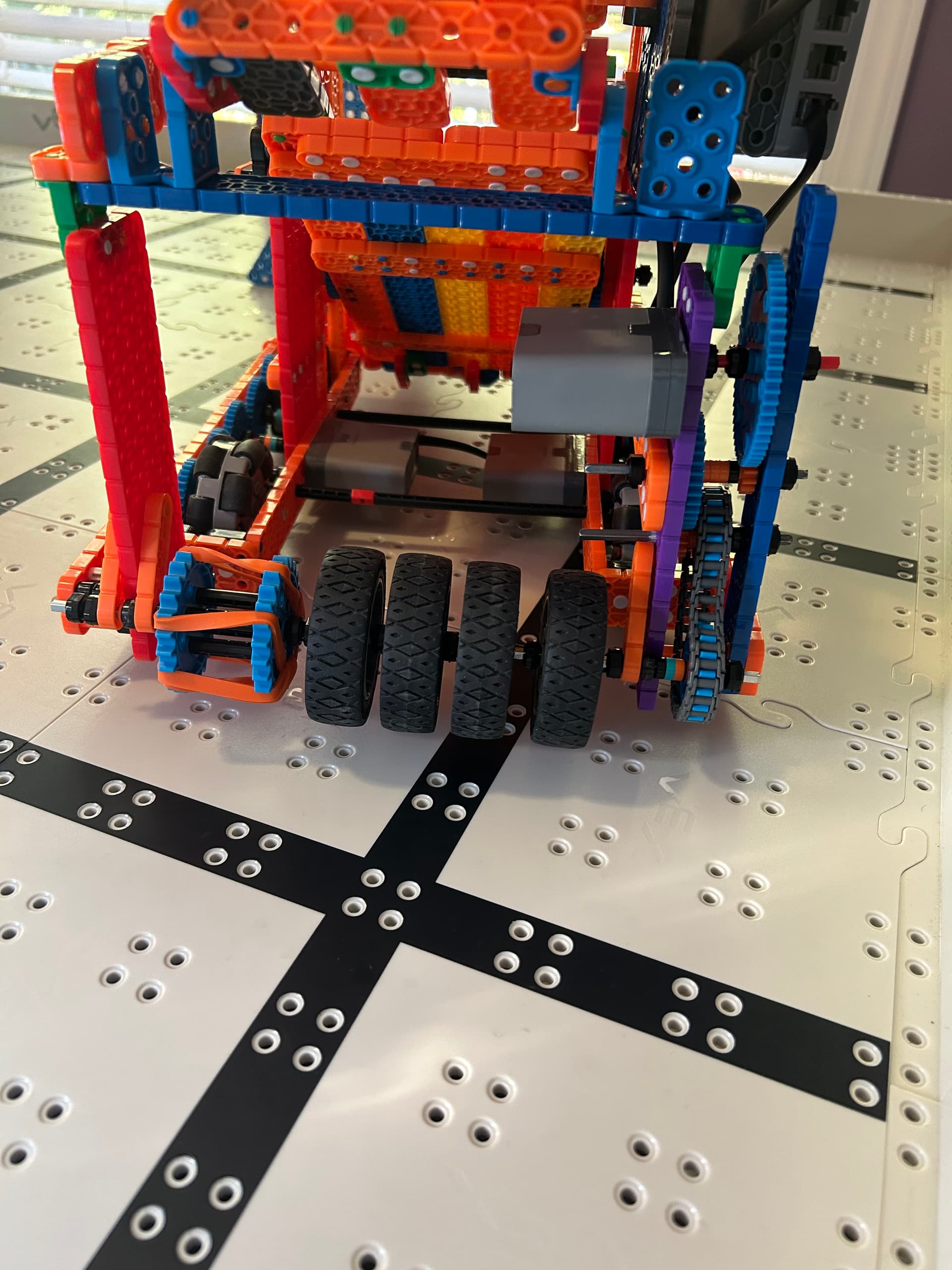
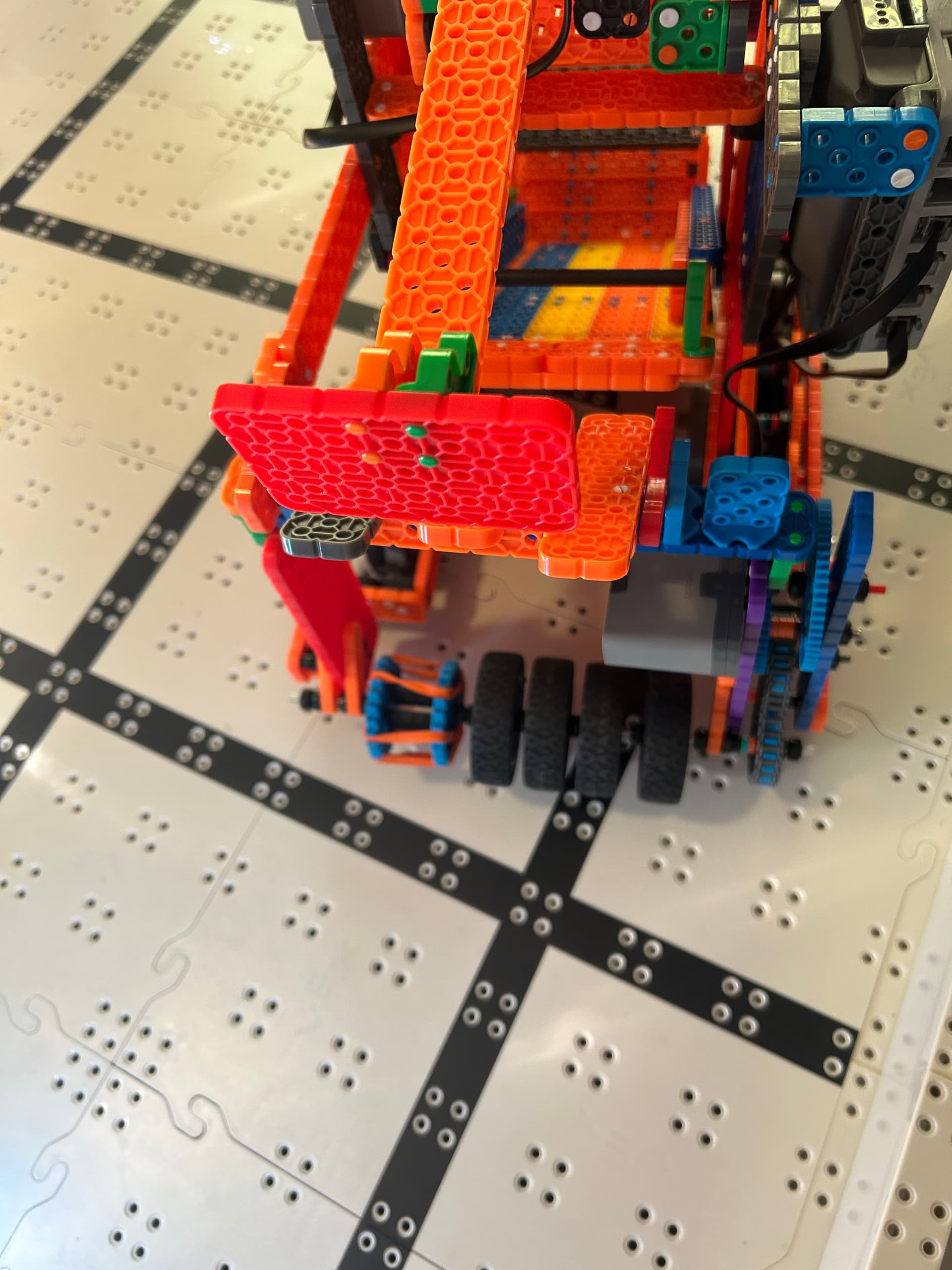
However, I have a slight problem. Whenever I go to the purple dispenser, I am not able to generate enough speed to release the discs from the dispenser. (Mind you that my “wheel” for the purple dispenser is attached to the flywheel to save a motor). Is there any way that I could speed up the process of dispensing the discs from the purple dispenser?
BTW, here are some pictures,

Gear the roller up for more speed, and position it higher. This will make room for the gearing and make it easier to align for spinning.
Improve the gearbox on the flywheel, and avoid using sprockets on it.
As others have pointed out, speeding up the flywheel and making it lower friction by replacing the sprocket and chain with more gears is a great start. I’d also like to offer this:
Use a bigger roller, higher up, for your Purple mechanism. I think the sprockets with rubber bands on the left side of the picture is what you’re using right now? The basic structure looks good, but a larger diameter sprocket, mounted higher up, will help a lot.
We are using the same bot. What we did, was on the side that the flywheel did not have gears, we used a sprocket gear ratio and it worked just fine
First thing you should do is restructure your drivetrain. Without a sturdy and squared off and perpendicular drivetrain, everything else will have a lot more friction from the slanted risers. I hope that helps.
Cheers.
@ShyamNitin , do the discs shoot fine?
The sprocket is meant so that when the discs dispense into the flywheel, it will be able to abosrb the angle of attack of the discs and not get jammed.
@childeater5 yes! They shoot nicely. But since I have to reverse the flywheel in order to intake the discs, it isn’t going fast enough.
As I said above, you can use elevate the rubber band intake, and connect it to another gear ratio using sprockets, preferably s speed gear ratio, this is what we did
@childeater5 Yes, Our team has also elevated our rubber band intake with sprockets and it works pretty well.