Hey everybody! In a combination of today and yesterday, I have been working on a CAD of a robot in under 2 hours. You might have seen me post about it in the VEX CAD and VEX Robotics discord servers.
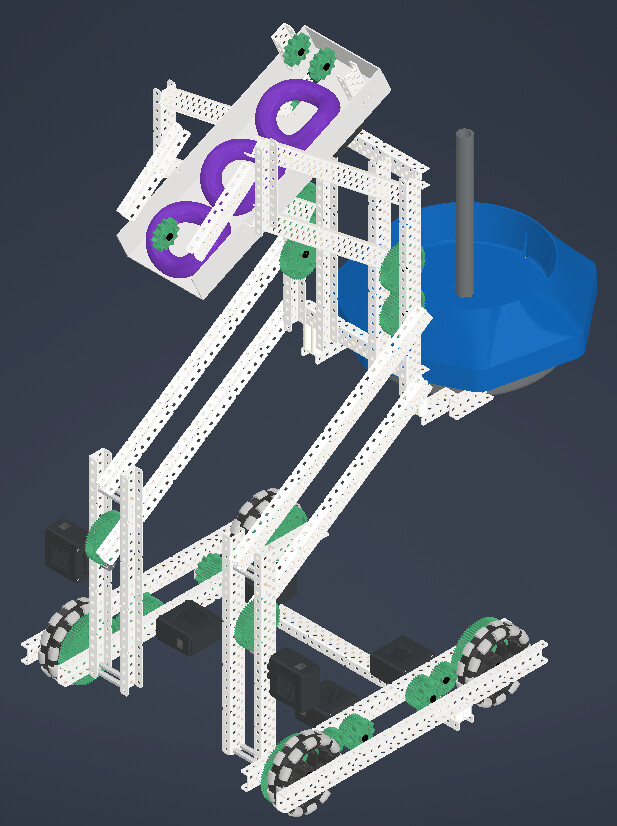
I present to you: Floodgate
Info - 7 Motors
4 Motor 257rpm drive
2 Motor DR4B
1 Motor Ring Intake
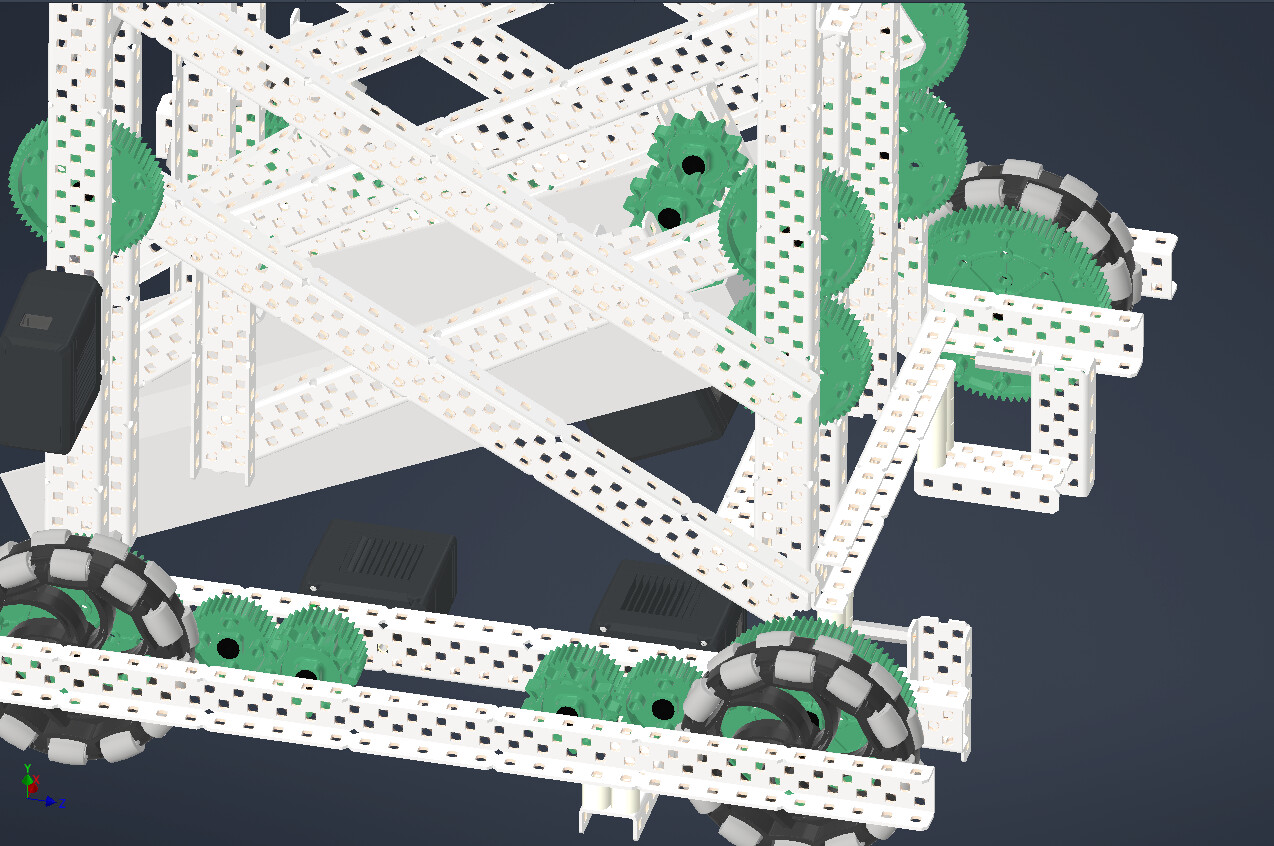
The robot consists of a pretty simple design, as I had to CAD it in under 2 hours. There isn’t a single bearing block on this robot, because again, 2 hours.
Features:
-Simple design, using only 7 motors
-Mogo lift on the back of the DR4B for picking up mogos - can be used to carry mogos over the top of the platform, and then drop them into a safe spot.
-Speedy drive to counter defense
-Fairly simple ring intake - I really liked the type of designs from Highrise, so I decided to go with it.
Now for photos! I can’t render for the life of me, so this is the best ya’ll are gonna get.
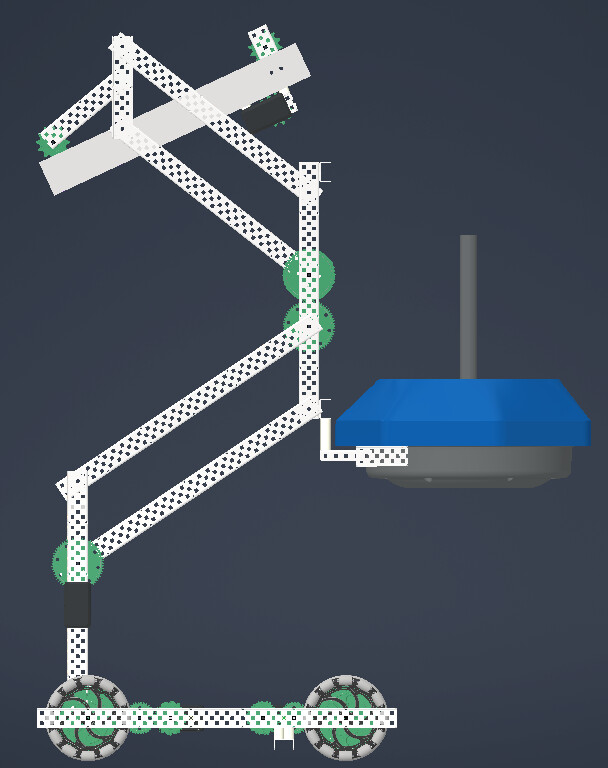
^side view, extended
^back view, extended
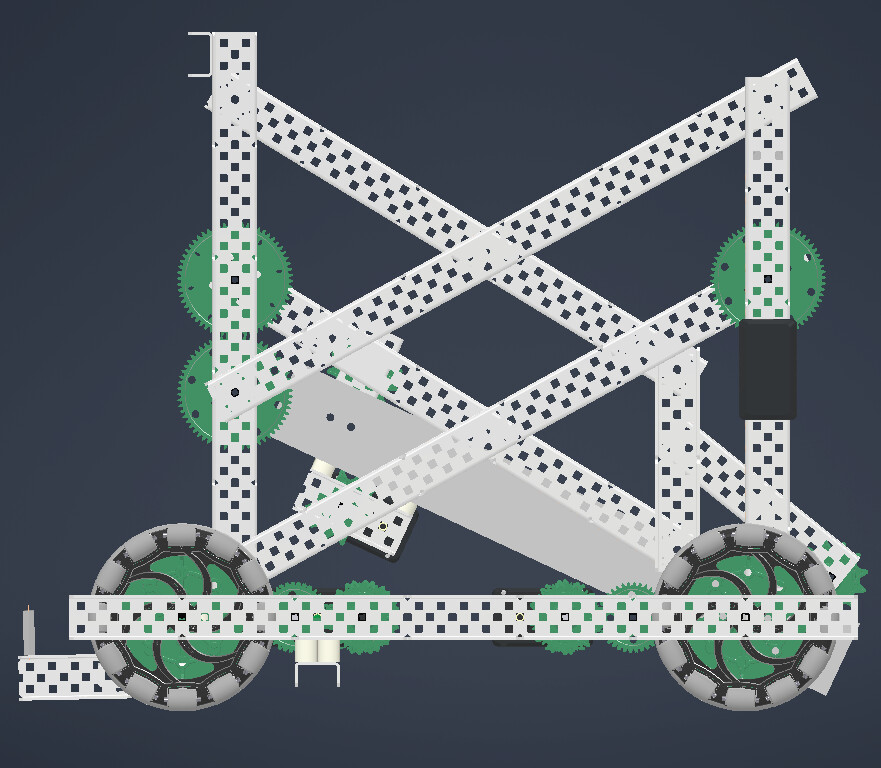
^side, collapsed
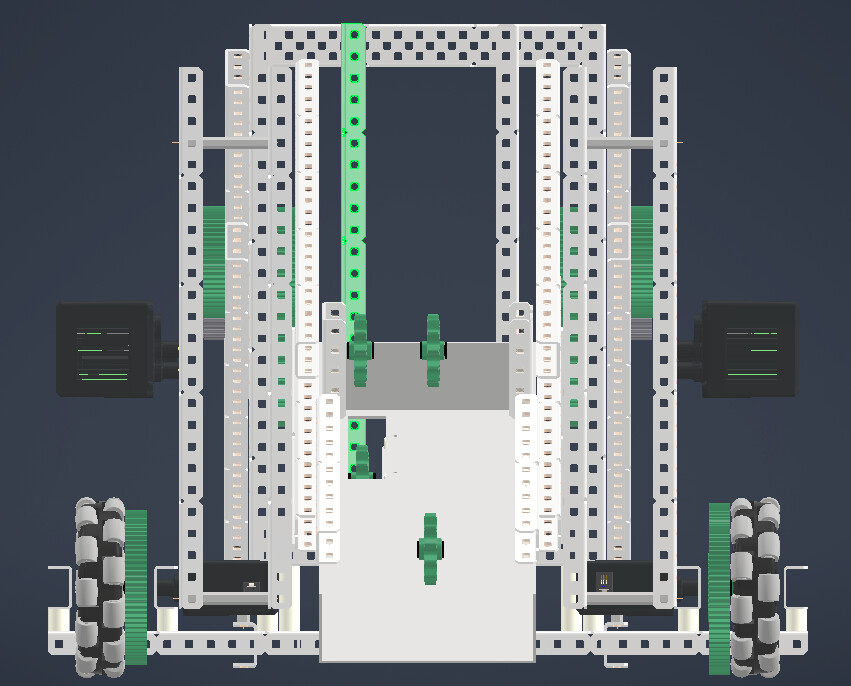
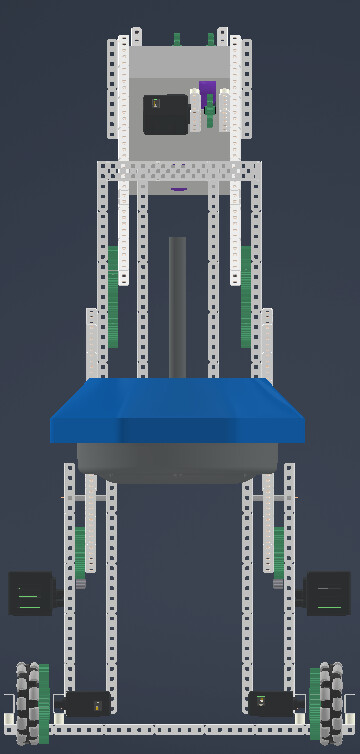
^front view
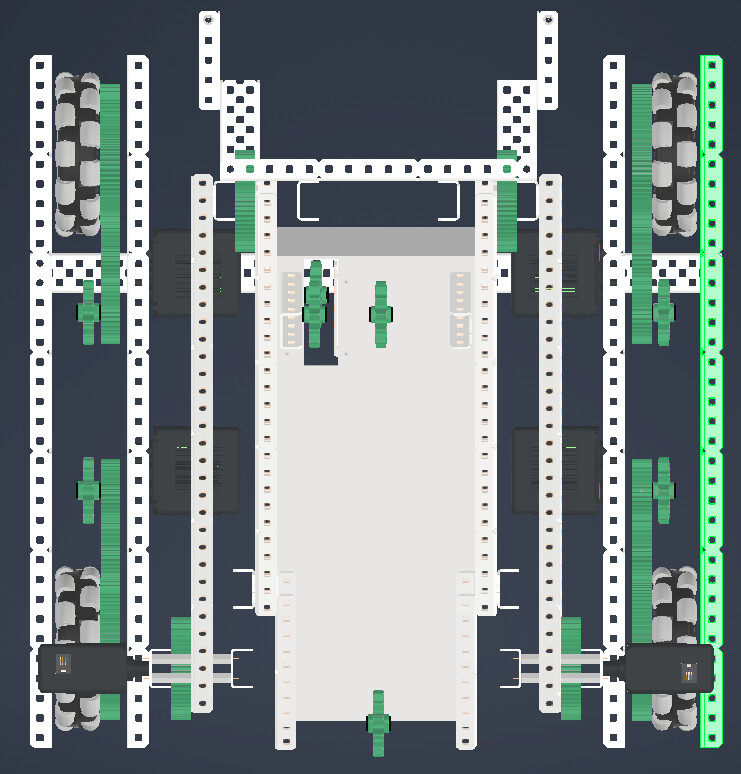
^top view
^The back mogo lift starts in an upright position, with some string in the gears of the DR4B, and then falls at the beginning of the match into a hard stop.
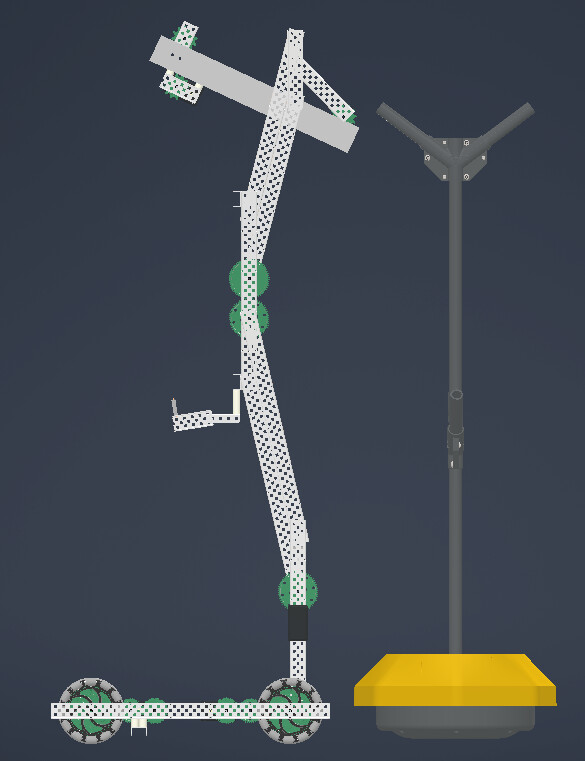
^just needs a bit more height to reach the tall branch (my b, my b)
This isn’t meant to be the end-all be-all robot, just an idea for a team that might be out of them. It was mainly made as a test of my CAD skills and also because I was bored. It has tons of flaws, and will probably tip a few hundred times lol. Thanks for reading! If you have any questions, chuck them in the replies.
Thanks, Connor Howard - Team 228A
Also, if I forget to add anything, there might be some edits later lol.