hey all,
wanted to ask a auton question about something I’m experiencing w inertial auton.
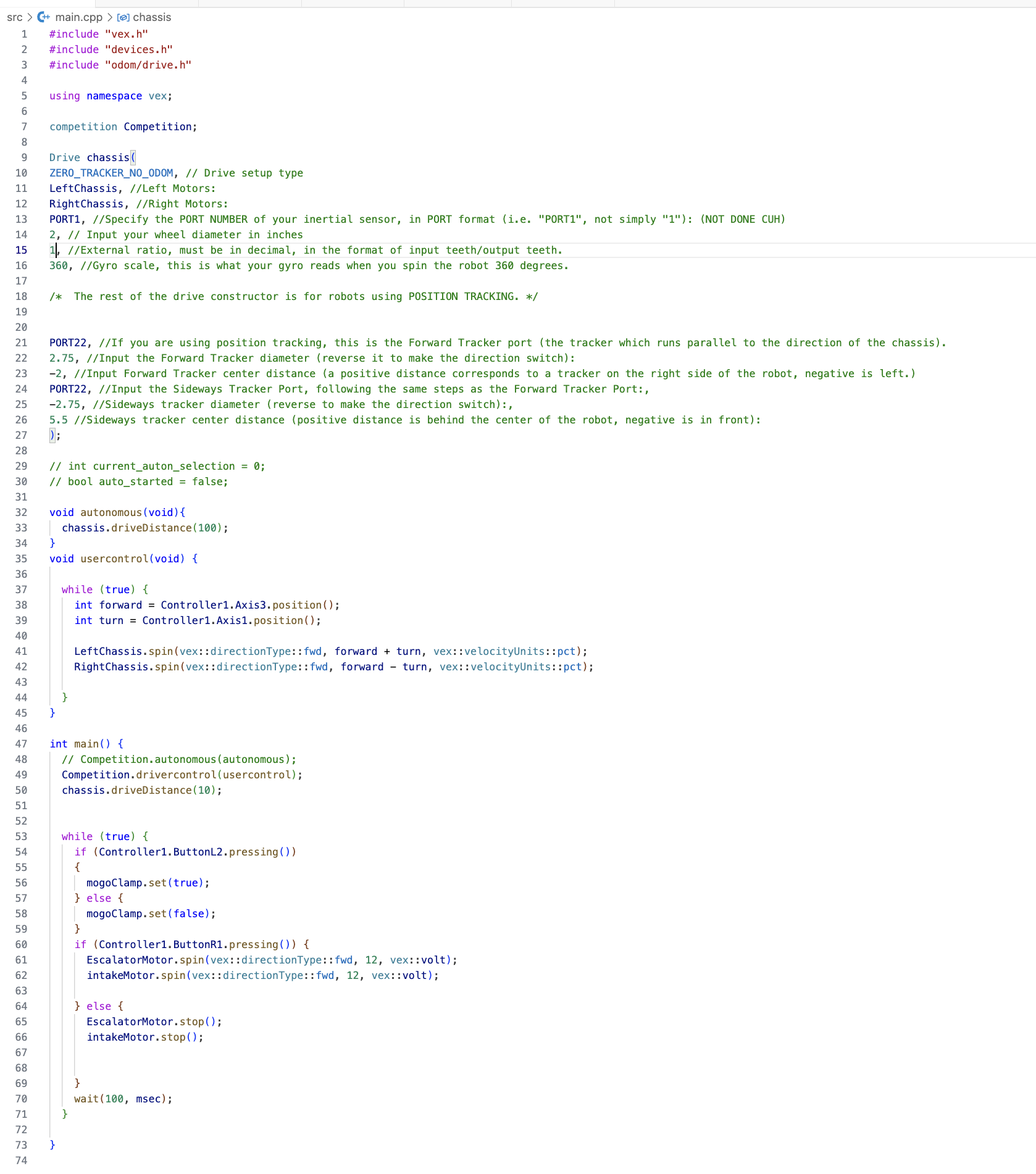
For some reason whenever I call a function like chassis.driveDistance() or any of the other auton commands in either the main file or usercontrols or in their own auton function that gets called in the main file, it just doesnt work and also stops the whole main file from working for some reason. I was wondering if you’ve heard of this happening and know how to fix it. I’m not doing the thing we had an error w last year where the robots auton was being called in the loop
I think its because personally cus our drivetrain rn doesnt have gears between the motors connecting the wheels for its design, and since the jartemplate you sent me has a ratio that uses those gears it might be messing it up. ill attach the entire main file code w an example of when it messes up in the code and how it looks when its there below. if you know a fix or where i could find it, id love the help. btw last year we didn’t have this problem with auton and we had gears but I might be overlooking something. if u have any questions to help get me to the solution I can get u more info. ty all so much!
thanks!
woah woah woah. please break down your issue one step at a time. You mention that whenever you call a function, your code breaks right? This might be due to incorrect declaration of variables or smth.
Then you mentioned that your drive train is not geared??? This shouldn’t matter. I suggest have your builders build the robot and then you or your coder test the code with either another drive base if you have one or you can just connect some motors to the brain.
and are you addressing this to a certain person? I feel like this is a ChatGPT prompt ![]()
I am pretty sure that you’re supposed to put all your autonomous code in the autonomous() function, and not main. (why is Competition.autonomous(autonomous); commented out?) I could be wrong though.