I have some students who want to program a 4 motor robot base to the two joysticks on the controller. The only way I can figure out how to use the joysticks when programming is to set up a drivetrain with only 2 motors. Is it possible to program the joysticks without using a drivetrain? Is it possible to have a 4 motor drivetrain?
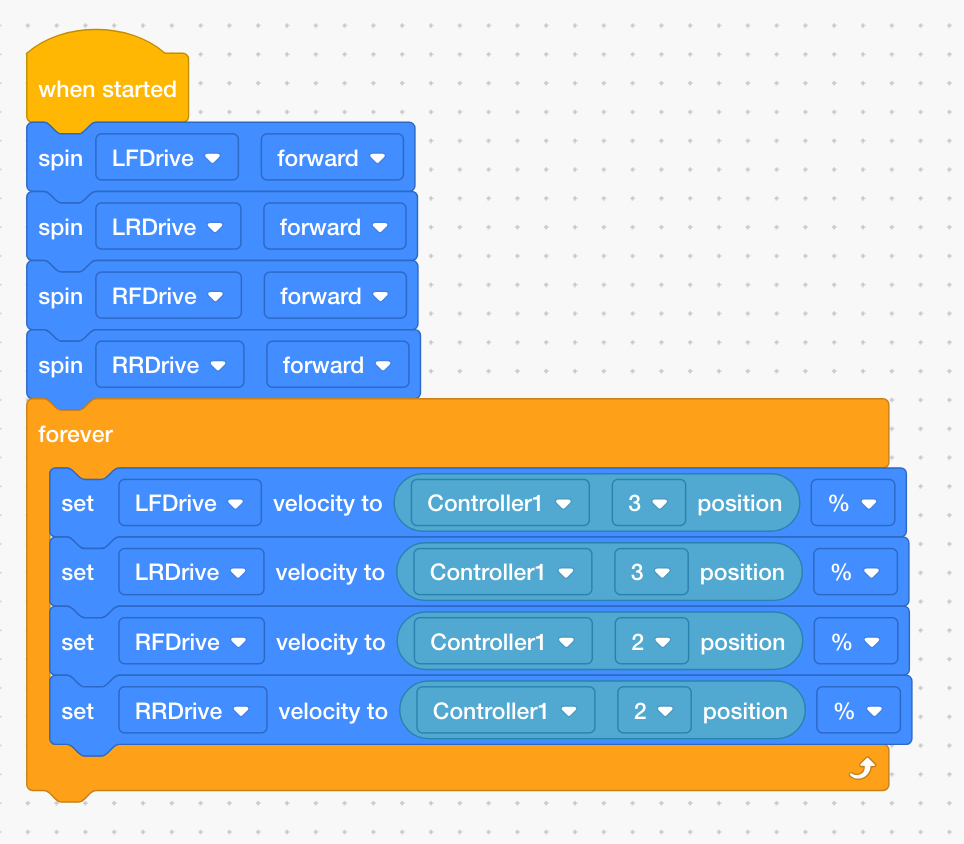
I didn’t know that you could just spin the motors once… Are you sure this will work? I have the spins under the sets in the forever loop.
I haven’t actually tried it on a robot, but based on the help text for the “spin [motor] forward” block, it should cause the motor to start spinning, and not stop until the program ends or a corresponding “stop [motor]” block is executed.:
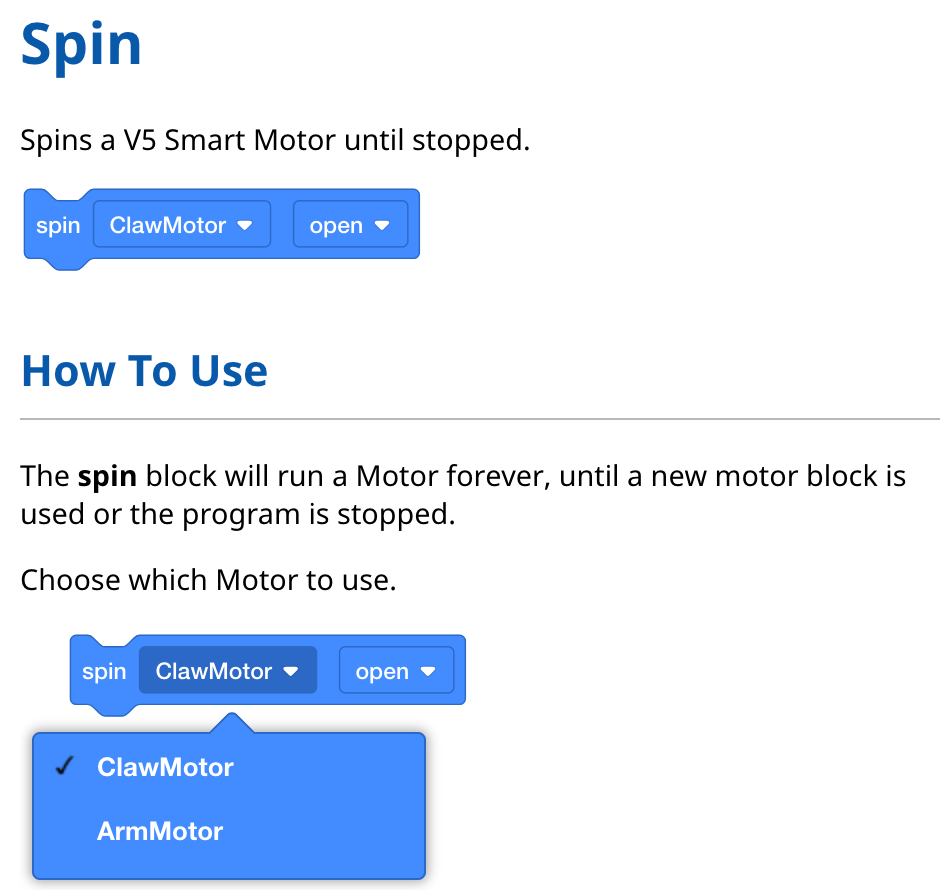
So it should be sufficient to tell the motors to spin once, and then continually update their speeds based on the joystick values.
Thanks! I will have my students try that.