Hello, I am an educator and this is my first year with the ability to program the vex robots. I am using vexcode IQ blocks. I have been running through challenges and writing a basic code for each of them. My classroom uses the basic clawbot, and we are working with the cubes that come in the classroom bundle. I am new to vexcode and have been trouble programing the claw bot to take the cube off the storage on the back of the robot. I can get the robot to grab the cube but if I add code after that the robot will completely avoid grabbing the cube. I thought it was a mechanical issue and I tested it with the controller and the code will work up to grabbing the cube.
I contacted vex and after a great and lengthy conversation the only help and guidance with their product was that I have a problem with the code. They wouldn’t assist be due to the REC foundations teams. I am not involved in the competition and I am just a classroom teacher trying to teach a basic robotics program. Any help with this would be appreciated.
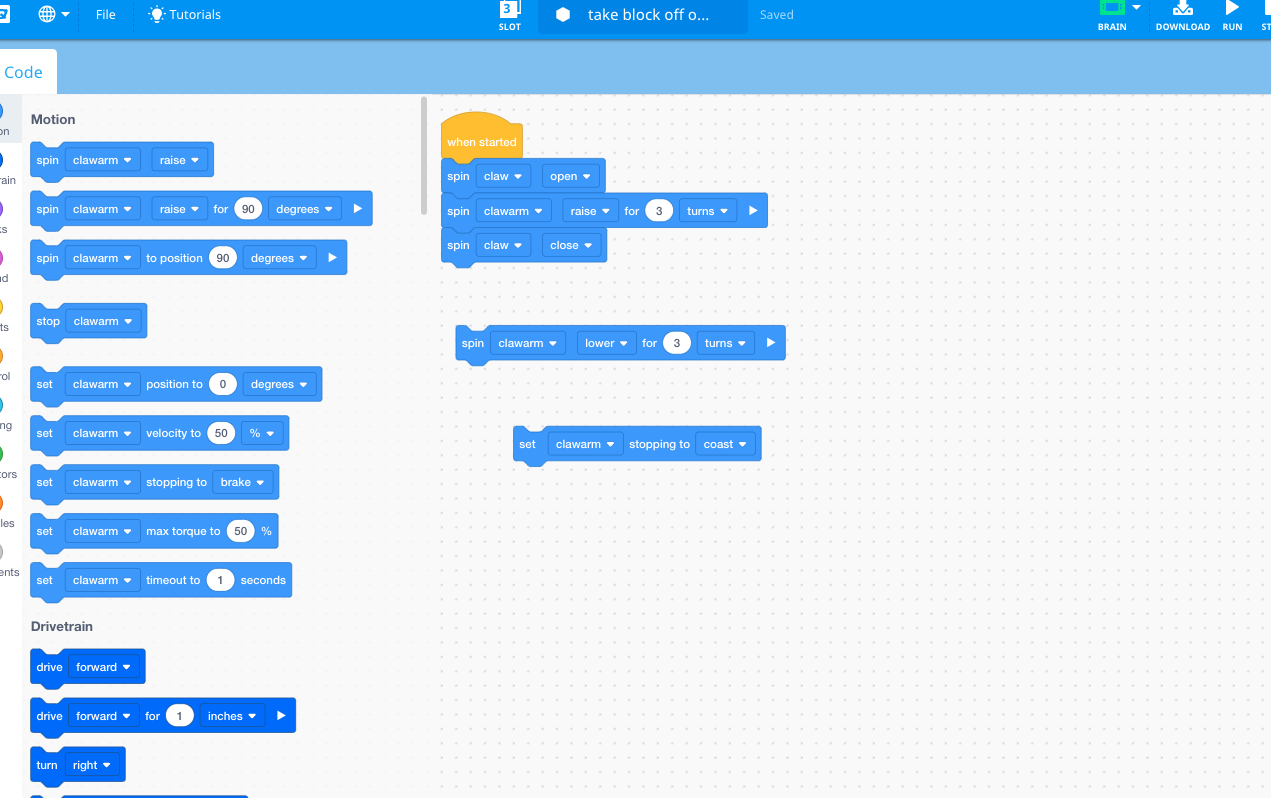
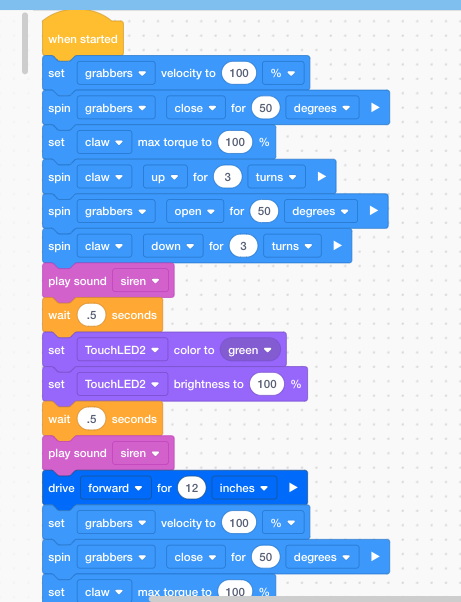
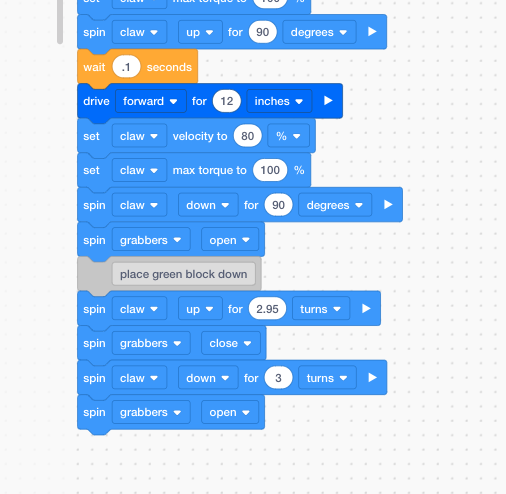
Attached are two codes. The short one I was testing just lowering the cube off the back. The long code I was having the robot move and grab two cubes and try to stack the cubes. Again I am just testing this to develop challenges for my students.
You probably aren’t giving the motor time to finish the movement before you tell it to do something else.
There is a little arrow at the far right of the Spin command - click this and add the wait to the end so the instruction finishes executing before moving on to the next one.
To add to what @calvc01 said, it looks like in the second picture your motor commands have no specified target or time to run.
The spin grabbers open/close blocks are executed, but the program moves on immediately before any real output. The arrow on the right is actually to make the program not wait at that block, but these spin commands have no duration to wait for.
When I click that arrow the only option I get is and don’t wait. I added a Wait Command and it grabbed the cube. Is there a way to change the “and don’t wait” when you click that arrow on the spin command?
@shredbeard so you are saying I would need to add a Wait ( ) Second command after almost every time the claw arm raises or the claw grabbers opens/closes?
It is only in the second picture that your grabber commands don’t have a specific target. Either adding a wait command or choosing a spin for degrees/turns instead of just spin should help.