I very well may have just missed this, but in the new release of vexcode v5 text, there’s a visual drivetrain config, but as far as I can tell it is only for two motor drives. Is this the case or can I input my 4 motor drive?
You are correct, the DriveTrain option under Robot Configuration currently only allows for two motor drives. Similar to this thread on the VEXCode v5 Blocks side of the world:
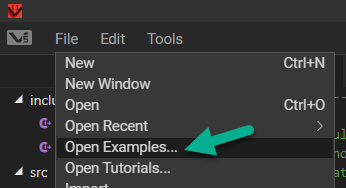
For teams that are starting out from scratch, they can start with the included examples like:
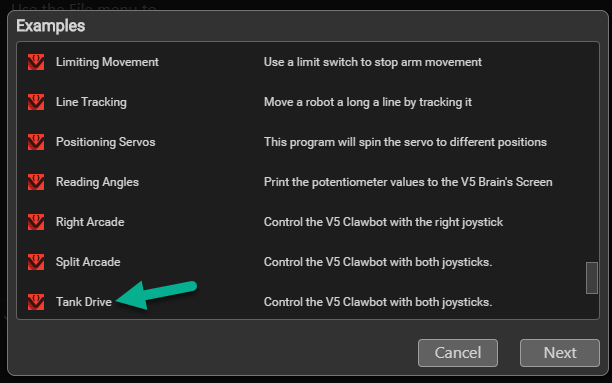
Then open the Tank Drive or Arcade examples:
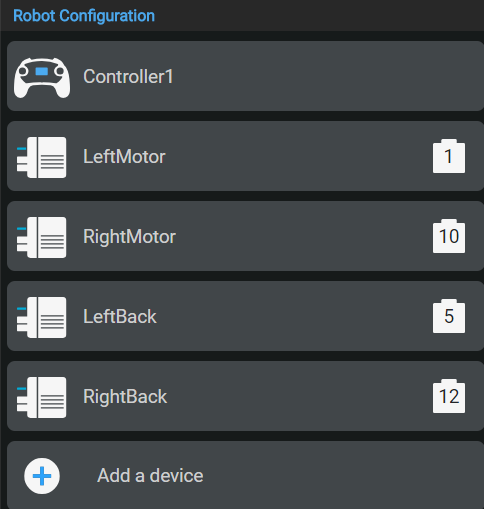
Then adjust the Robot Configuration to include the two additional drive motors:
Now adjust the code in main.cpp accordingly to include the new motors. This is where the student can learn how to write the code and add the correct motors in the right way:

Just came across this post that might be helpful.
Looks like the you can create two motor_groups for each pair of motors, and then initialize the drivetrain with the two motor_groups for your four wheel drive. It doesn’t seem like this can be done with the visual config, the code example in that post should hopefully get you to what you need. That way you’ll still get the benefit of the drivetrain functions that are available.