Controlling the quality of our VEX radio links is always a challenge for large competitions like VEX Worlds. This year, in order to make sure our division matches and skills attempts work as smoothly as possible, we are going to run all of our skills attempts using the VEX radio in bluetooth mode instead of VEXnet mode. This will allow us to accommodate more skills fields so that we can give each team plenty of time for their skills runs.
Bluetooth has commonly been used with V5 in classrooms. It allows the brain to communicate with tablets and mobile devices for remote user app downloads. But the V5 controller also supports bluetooth and functions exactly the same as VEXnet. We have not used bluetooth in the past because we have been able to have adequate spacing between division and skills fields. But this year, that will not be the case. So this year every team will have to switch both their V5 brain and V5 controller to bluetooth mode before they can start their driver and programming skills attempt. We want to encourage all VEX World teams to start using Bluetooth radio mode for skills practice runs so you will be comfortable with these new settings.
Here are a few common questions:
How do I change my robot from VEXnet to Bluetooth mode?
Changing the brain:
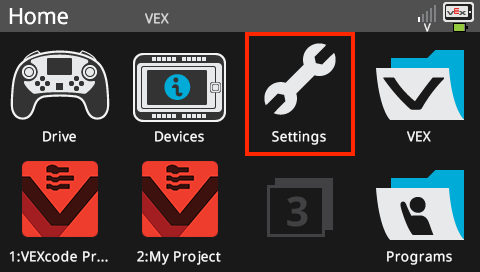
From the home screen select “Settings”
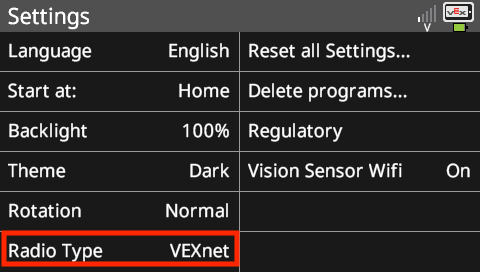
If the “Radio Type” box says “VEXnet” click the box to change it to “Bluetooth”
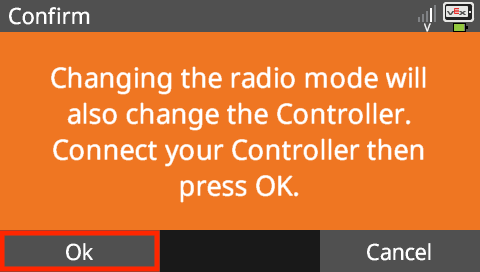
A confirmation dialog will be presented to verify your choice. Click “Ok” NOTE: You can tether your controller to the brain at this point and the brain will change the radio mode of your controller for you. But if you do not tether your controller at this step you can either tether it later or manually change the radio mode using the controller’s menu.
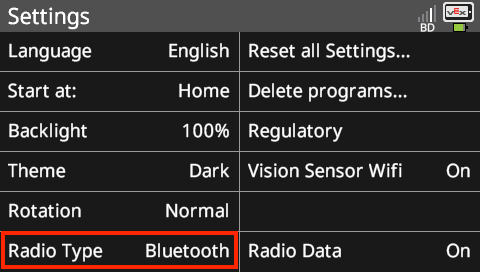
Once you click “Ok” verify your “Radio Type” now says “Bluetooth”
NOTE: You do NOT have to turn on “Radio Data” to use the controller in Bluetooth mode for your skills attempts.
Changing the V5 Controller:
Once you have configured the V5 Brain to Bluetooth mode, you can then tether your V5 Controller to the brain and it will configure the Controller for you.
You can also manually change the radio mode on the settings screen of the controller.
Select “Settings” from the main menu on the controller.
Scroll down to “Radio:VEXnet” and select that row.
The text should change from “Radio:VEXnet” to “Radio:Bluetooth”.
NOTE: You do not have to pair the controller with the brain again. As long as both the brain and the controller are set to Bluetooth mode they will connect.
Will my robot function the same with the radios in Bluetooth mode as it does when they are in VEXnet mode?
Yes. Bluetooth and VEXnet share the same feature set. They both pass the same controller data to the brain at almost the same interval (VEXnet updates every 25 milliseconds and Bluetooth updates about every 15ms). Both radio modes allow for field control states to be passed via the radio link.
The only difference you may notice is that Bluetooth mode takes a little longer to connect than VEXnet. This is because of the overhead of the Bluetooth connection. Also, there have been some reports of Bluetooth connections taking a long time to connect. If you see this happening, try power cycling your controller.
What happens when I get to the skills field and I forget to set my robot to Bluetooth mode?
When you plug your controller into the Smart Field controls at the skills field, the field controller will show an error message saying that you need to change your radio mode to Bluetooth. Once you change the settings on your robot the field controller will allow you to start your skills run.
What happens when I forget to change my robot back to VEXnet mode before I get to a divisional field for a division match?
When you plug your controller into the Smart Field controls at the division field, the controller will show an error message that you need to change your radio mode to VEXnet. You can change the mode at the field and once done the field control system will allow the match to proceed. The field techs will be there to help if needed.
We are not saying it is better. The reason we are using it for skills is because we have a large number of robots running at random times and we only have a certain number of VEXnet competition channels. So if we want to run the skills runs as efficiently as possible we have to use bluetooth.
If I understand correctly this change is to prevent the clogging of channels. Is there going to be issues on practice fields with the amount of robots there. Are robots just going to be kicked off channels randomly during practice?
Can you give some insight as to the number of competition channels available for VEXNet 3.0 / v5? For VEXNet 2.0 there were 150 competition channels available, with 250 channels in total. VEXNet 3.0 doubled this total to 500 channels, but it was never stated what the new number of competition channels was. Given that this wasn’t an issue with VEXNet 2.0, was there a reduction in the number of competition channels available with VEXNet 3.0?
That is a great question. Pit channels are always a mess at worlds because of the amount of robots. I don’t see this year being any better or worse. But if you have issues testing your robot on with VEXnet pit channels you can always switch to Bluetooth for practicing. Just make sure you switch back to VEXnet before your match.
So just to be clear- I’m not going to get yelled at by a ref for trying to fix this issue after I’ve already set down my robot? The manual seems to say that once you have “placed” your robot you cannot move/touch it. the definition of placed is subjective but that is qna-type question. referring to T4 and T6:
Many teams are used to placing their robots on the field, and then turning the robot on after the controller has already been plugged in due to trying to prevent pneumatics from making any extra actuations and the battery running down. If I set up my auton and have my robot placed, and then proceed to discover the brain is not on VEXnet, are the field techs still able to help me/am I allowed to touch my brain for the sole purpose of doing this? Or is it too late?
I understand you may not have an answer, I am mostly asking an open-ended question to bring attention to a possibly overlooked topic. The rule has been interpreted in multiple different ways; for example, not being able to touch the robot after you let go of it. So it doesn’t have to just apply to turning on VEXnet on your brain. Again it might be best for this to be a qna question (I personally can’t but if someone wants to that could be helpful). The definition of what exactly “placed” means should probably be clarified.
edit: I realized the qna is closed. Point still stands, though.
VEXnet 2.0 and VEXnet 3.0 have the same number of pit, competition and download channels. The issue this year is more about spacial diversity. The Dallas venue is smaller than the Kentucky venue. In Kentucky we would spread the divisions and skills fields far enough apart so that we could duplicate channels on fields that could not interfere with each other. This year we have a unique competition channel for each division. The way the schedule works this year is helping some being as we do not have all the HS VRC teams running at the same time as MS and U.
And to clear up some terminology, Each channel can support 8 robots, with the exceptions of download channels which can only support 2 robots. There are 10 Competition channels, 12 download channels and the remaining channels are pit channels. The divisions are using all of the competition channels this year and because we cannot space the skills fields far enough from the division fields we have to use Bluetooth to not interfere.
All of the referees and techs will know that this situation will be different from other competitions and they will show grace being as that is the case. If you set your robot down and then plug into the field and get the radio error, they will allow you to change your radio mode so you can proceed. But with that being said, do your best to come prepared. This information will be discussed at the event with teams. I am sure it will come up in the drivers meeting as well as in inspection. That is also why we are posting about this now so we make sure everyone knows.
Oh that’s very interesting to hear, thank you for the explanation. I think there’s some confusion stemming from the VEX website which makes statements like
The V5 Robot Radio and V5 Controller use our next generation VEXnet 3 protocol. This is based on the success of VEXnet 2 and adds additional features and faster download channels. VEXnet supports 500 simultaneous robot channels, even when operating in a confined space. The radio provides the responsive, low latency control that drivers expect, while also allowing fast program downloads and robot feedback.
Maybe the information on that page could be updated to instead have the content of your post, which seems to much more accurately describe the system. I’m always glad to get more details from official sources about how V5 works
This doesn’t make a lot of sense because the agenda says skills fields are in the 3rd floor ballrooms. Unless something has changed dramatically I’m pretty sure VEXnet and Bluetooth wavelengths don’t travel well through concrete floors.
What is the “capacity” of V5 radios in Bluetooth mode and how does that compare with VEXnet 3? When you specifically develop your own protocol and channelization for robot radio communications you do it for good reason.
Next question. Is VEXnet 3 in separate radio spectrum from Bluetooth? Or are you just overlapping spectrum usage anyhow?
Yes they are different encoding schemes. But spectrum is spectrum and just changing your encoding scheme doesn’t prevent interference. Bluetooth is frequency hopping and generally operates using collision avoidance. Historically WiFi and Bluetooth on 2.4GHz spectrum haven’t played nicely together however there have been many mitigations implemented. Personally I don’t think VEXnet 3 and Bluetooth will do much other than fight each other in a crowded spectrum environment and that’s exactly what worlds will be.
I can understand you confusion. Yes, the skill fields are one floor above the hall with the divisional fields but the only thing between the the two halls is a large lobby that is open to both floors and two sets of doors. We have already run radio tests in the venue and this decision was made based on the finding of those tests. While it is hard to accurately replicate exactly the environment with all the robots and spectators that will have active RF devices at VEX Worlds, we are confident that this is the best setup for this situation. Trust me our engineers will stay on top of this for the entire event. If problems show up we will adapt to make sure competition can continue.
That’s good to know, thanks for clarifying. Having experienced a few too many match affecting radio communication issues at various world champion events (VRC pre VEXnet 3, FTC and FRC) over the years it would be nice to have no problems for a change!