It is a mechanism with three drive shafts, where the rotational speed of any one shaft is the average of the other two. It’s most often used in cars for the powered axles, so that the inside wheel can rotate slower than the outside wheel, which is important as the inside wheel covers less distance than the outside wheel. This mechanism reduces the amount that the wheels have to slip while making a turn.
As far as robotics goes, differentials aren’t used very often, as usually we use individual motors for each side of the drivetrain, which can accomplish the same effect with less mechanical complexity. There are a few other uses, but I haven’t personally seen one in use in a competition robot. One of our alumni visited us and built a robot that used one to power the rear wheel. It was a really cool project, but it wouldn’t have worked well in a competition.
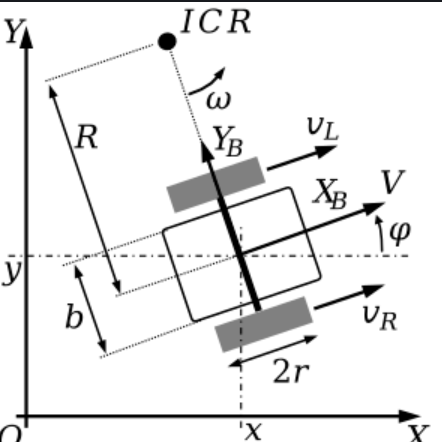
It’s worth pointing out that differential and differential drive (which is your diagram) are different. Differential drive is what you would think of as a “normal” drivetrain, while a differential is what Theresa explained above.
The Wikipedia Page on Differentials has a great video for understanding the mechanism visually.
Additionally, the search bar is your friend. It is in the upper-right and has some results for the search “Differentials” so here is one of the results (I encourage you to do a search yourself too): Vex Differentials Explained.