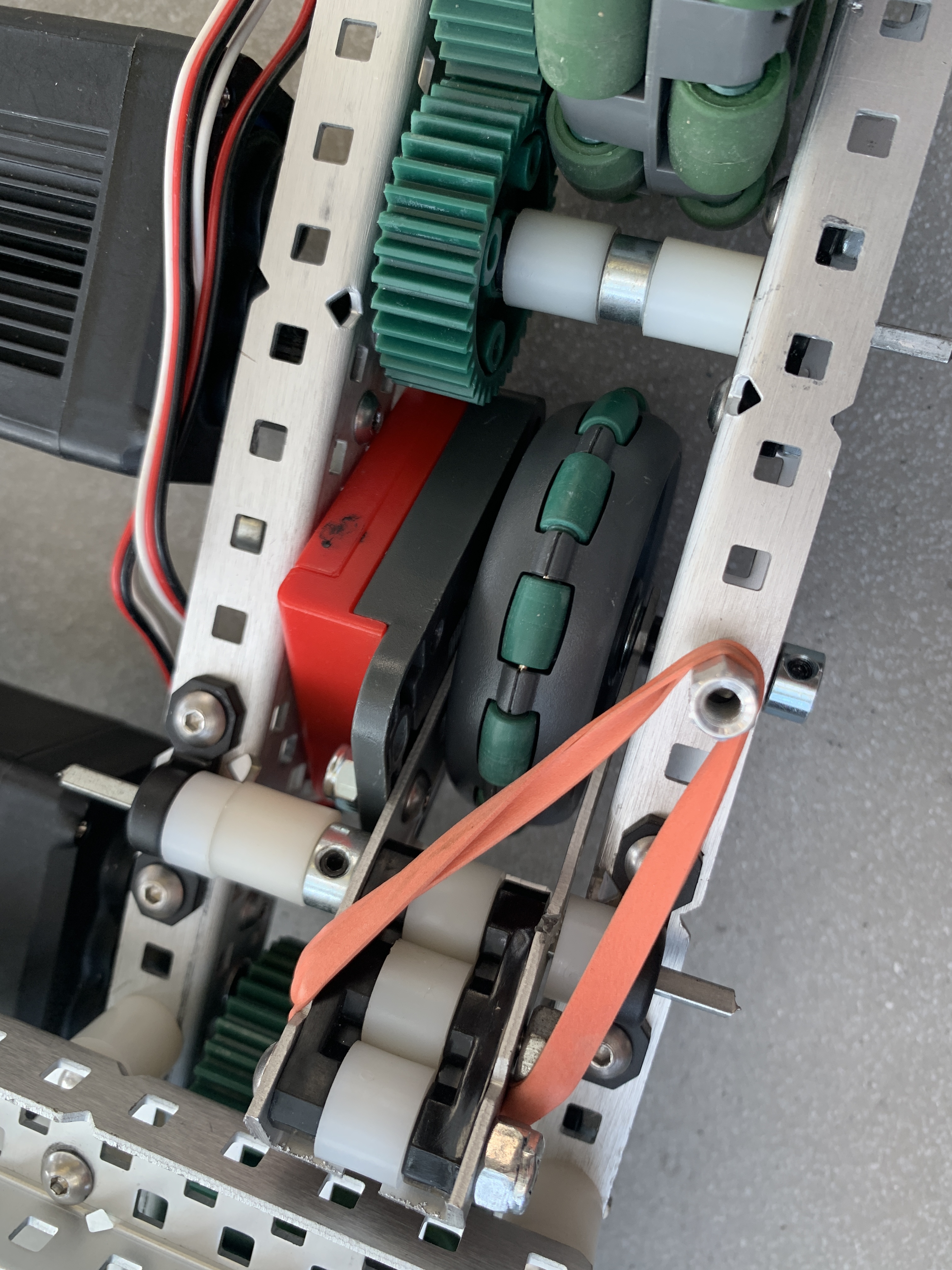
This design definitely has more slop than a screw joint. Anything with chain has a decent amount of slop
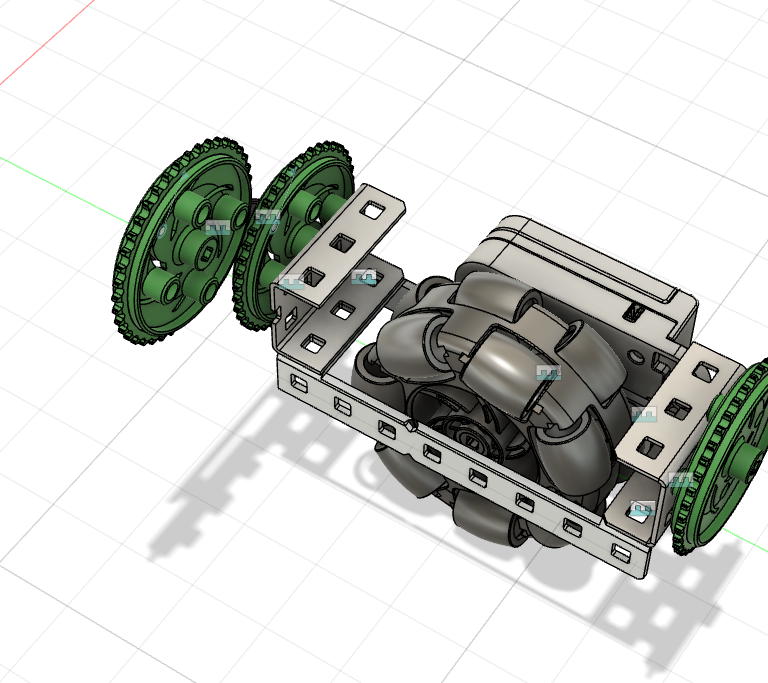
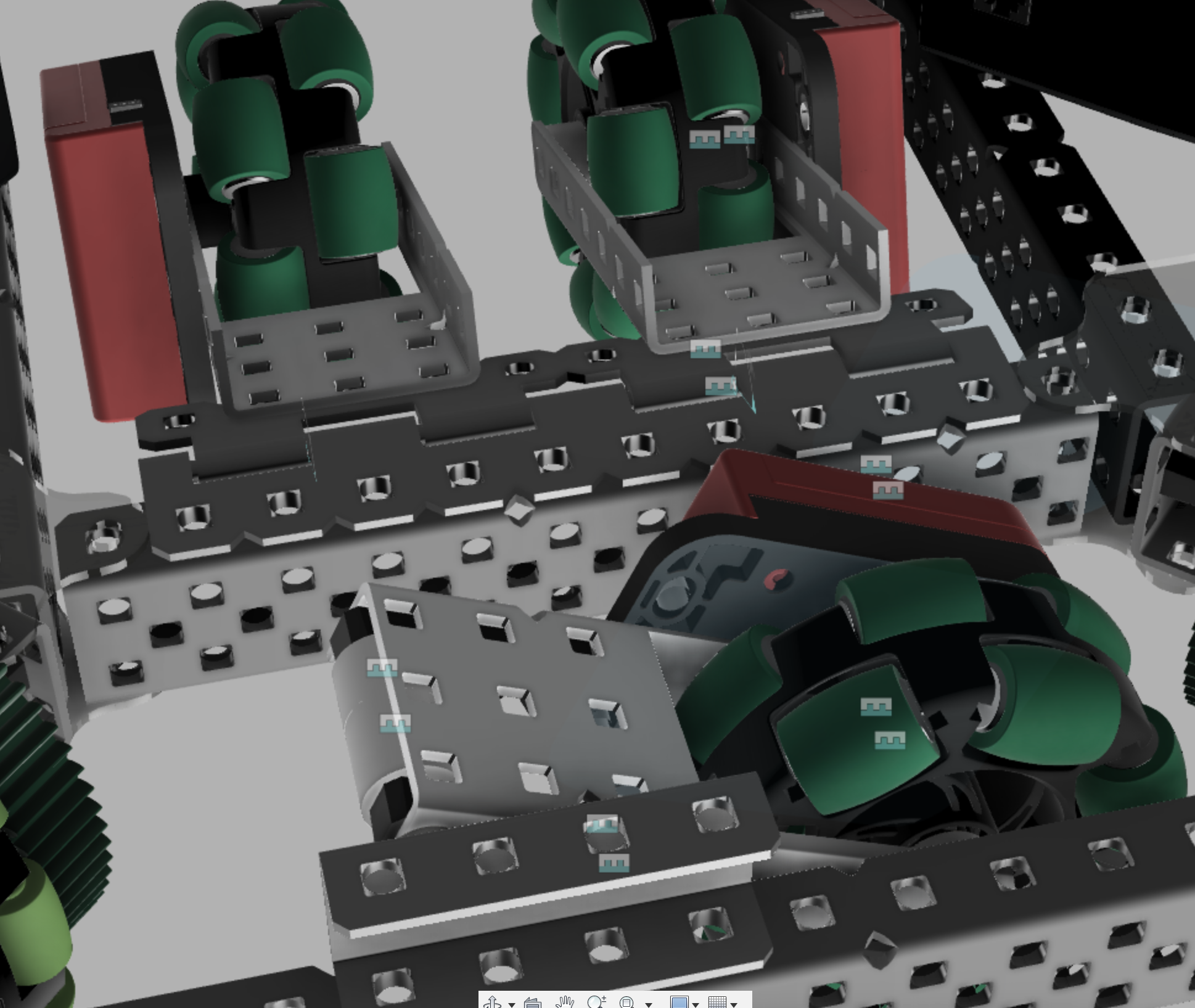
I’m not even sure how this is supposed to be attached to the robot
This is not worth the extra trouble and space it will take up. Screw joints work perfectly fine and have almost 0 slop
I’ve mentioned this before
Also this is a side to side roller so this is why I’m over complicating it
Edit: I’m not talking about the slop from it rather the motion of it
This is not an issue at all unless you somehow tip the robot sideways
I’m a little confused now. What makes u think the screw joint having slop would make it touch the ground at a different height? The slop in the screw joint matters as much as the slop in the chain- both are passive in the same way. The only difference is the chain adds more room for something to go wrong and takes up more space
I’m planning on using 250 rpm 4 inch wheels so I need to make sure it’s always on the ground
They’re saying the motion of the joint on the lever arm of the wheel could cause it to slip side to side. in reality this would happen almost never
If you rubber band a screw joint down it should always be touching the mat, providing traction for the Omni wheel to spin
ok, I just don’t think it’s worth the trouble. If you want to put this on your robot, by all means do so.
I don’t really mind over complicating it because I’ve got plenty of room and any small optimizations are worth it
That’s the most cursed odom Mount I have ever seen.
@9935E, if you would like to see VEX Worlds winning robot’s tracking wheels mech and odometry algorithm that goes with it, then it is your lucky day:
But, if you will insist that 5225A’s design is not accurate enough for your not yet built robot…
Then I must, regretfully, conclude that you are either trolling or hopelessly unable to accept or understand good advice that @kevjar and @Ethan5956F were kindly giving to you.
Please, don’t treat forum as a chat, learn to love search function, and take some time to read thoughtful advice that more experienced members are sharing with you.
I’ll try both but I’m going with my design first also the best way I can mount my tracking wheels is really high so I need to make sure it stays in the right spot.
yeah screw joint works out pretty well with 250rpm drive on 4” wheels
it never leaves the ground and have us some accurate programming results. U see a shaft joint because we ran out of space, but we made it with screw joints afterwards and there is nearly zero slop when built correctly
If you’re worried about the wheel moving sideways with respect to your robot when it moves up and down on the pivot, don’t.
Yes, it will introduce a very tiny amount of error, but as soon as it rotates back the error is corrected for.
Coming from someone who overcomplicates everything, a chain mechanical will only introduce much more slop without giving any benefit. A 4 bar built perfectly would work just as well as a single screw joint, but not any better and it takes up a lot more space.
I can see what you mean by the wheel moving sideways slightly from the pivot, but this error is so infinitesimal that it doesn’t matter at all tbh.
My forward and backward odometry wheels are mounted on a pillow bearing with a screw and has a system so the rubber bands can’t slip and apply continuous force no matter what the wheels are angled at.
Edit: Might be useful idea for using pillow bearings Since you can mount them in almost any direction and have stand-offs so their further away from what their connected to.