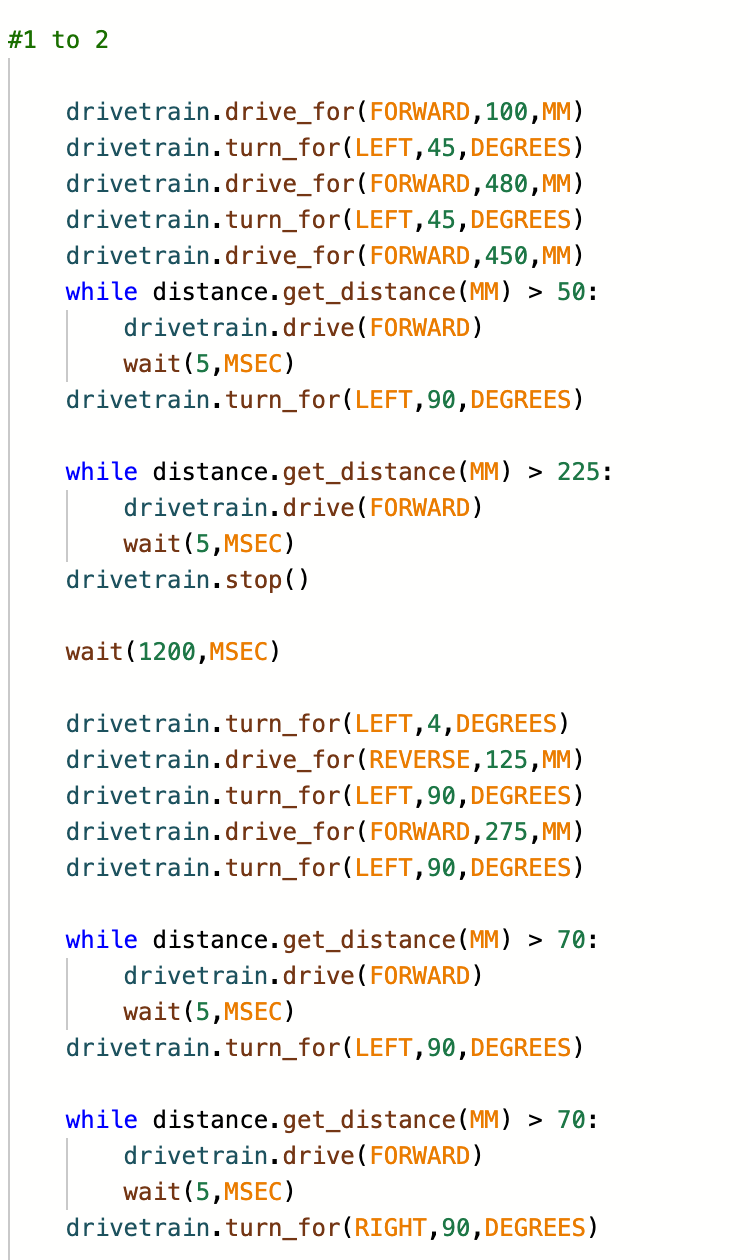
My students coded with distance sensors, basic drivetrain commands and simple if and while loops, to accomplish the competition challenge level 1 of vex vr activity “number maze”. (Number Maze - VEXcode VR - Google Docs) Something interesting is the executions are not consistent. Only 3 out of 10 executions succeeded. The drawn routes of successful execution don’t look the same. The failed executions are different as the robot just hit random walls at various locations.
I guess the reason is the distance sensor. However what is the detailed reason? And how to solve this issue to make the execution consistent?