Yesterday we encountered an issue where two 100 RPM motors on a 7:1 ratio were overheating very quickly (about 60 seconds, non-continuous use). We spent all of yesterday and today’s sessions, totaling 4 hours, troubleshooting.
What we know:
Wires are neither internally nor externally damaged. (We’ve checked them with a wire tester, and checked them externally for pinch points and damage to the rubber).
There is not too much tension on the wires.
Wires are new and standard length (Not custom cut).
100 RPM Cartridges, geared to 7:1
Not moving significant weight.
No excessive friction.
Newly replaced brain.
We’ve had repeated motor failures in that location, across many iterations of our robot.
Fields are sprayed with anti-static spray.
Lift holds itself up with the robot off due to rubber bands.
We took apart the motor to inspect the circuit board, and found damage looking down and to the right of C14 and R12 (away from the motor). Our theory as the damage here caused electricity to turn into heat, overheating the motors. I have a picture of this damage in case anyone wants it posted, but it’s blurry due to light reflection.
Of the list of people who have taken a look are an Electrical Engineer (our mentor), a Robotics Professor at a local community college, a Mechanical Engineer (a volunteer at our program), and our local RECF RSM. We are all stumped at what could have caused this. If anyone has any ideas on things we can test, please let us know. We have 4 competitions between now and January, so we need to figure out why quick.
Do you have any pictures of the lift? I’m no electrical engineer or anything but if multiple motors and a new brain were tested, it might be the lift. Does it have rubber bands on it?
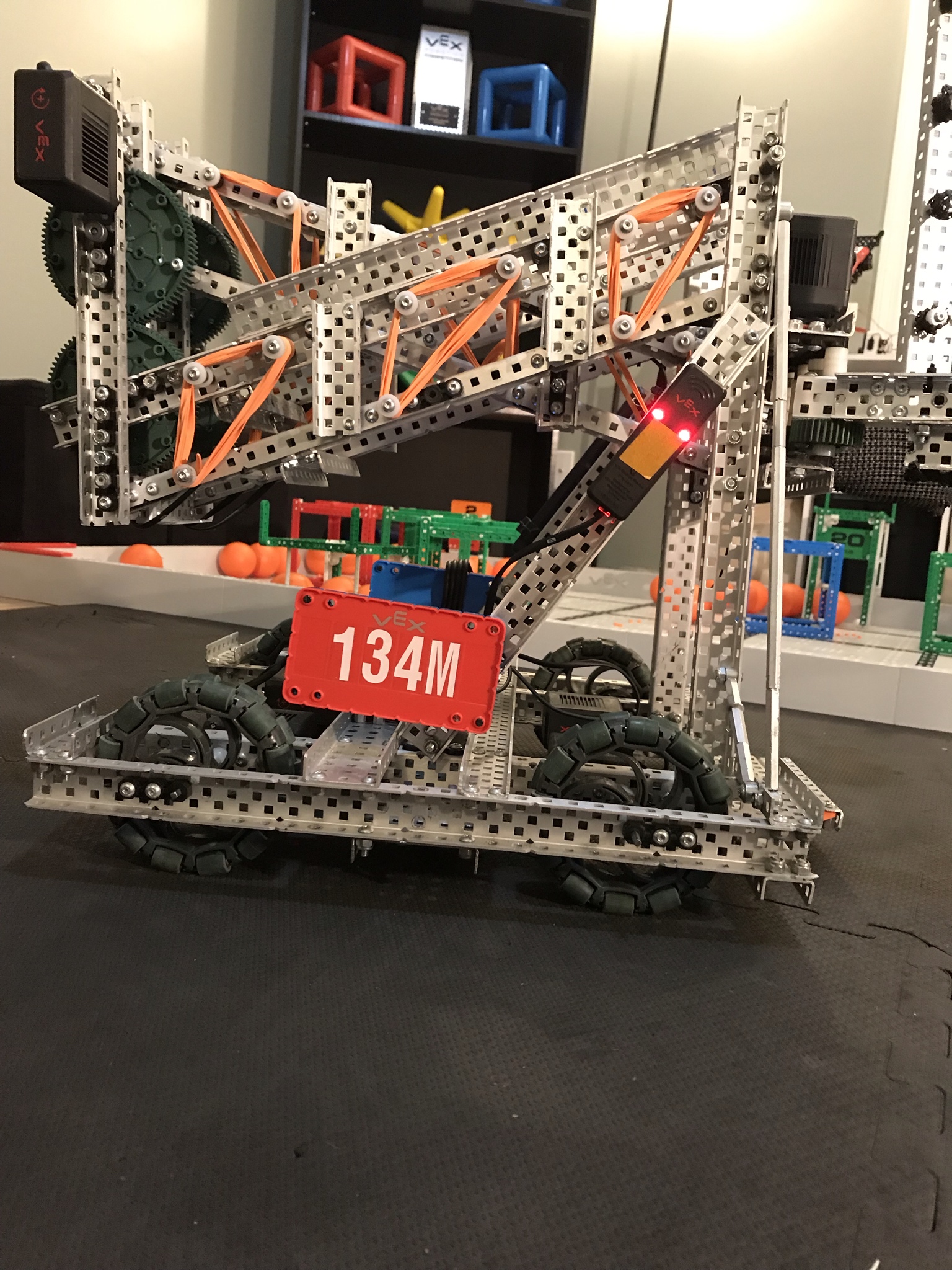
They do have rubber bands on them. I have some images of the lift, if you need better images/images of different parts or angles, let me know and I can get them tomorrow.
does the lift stay at a certain position without a mechanical stop. also do the rubber bands force the lift up with the program off. if if its the second option it could be your motors fighting against the tension of the rubber bands
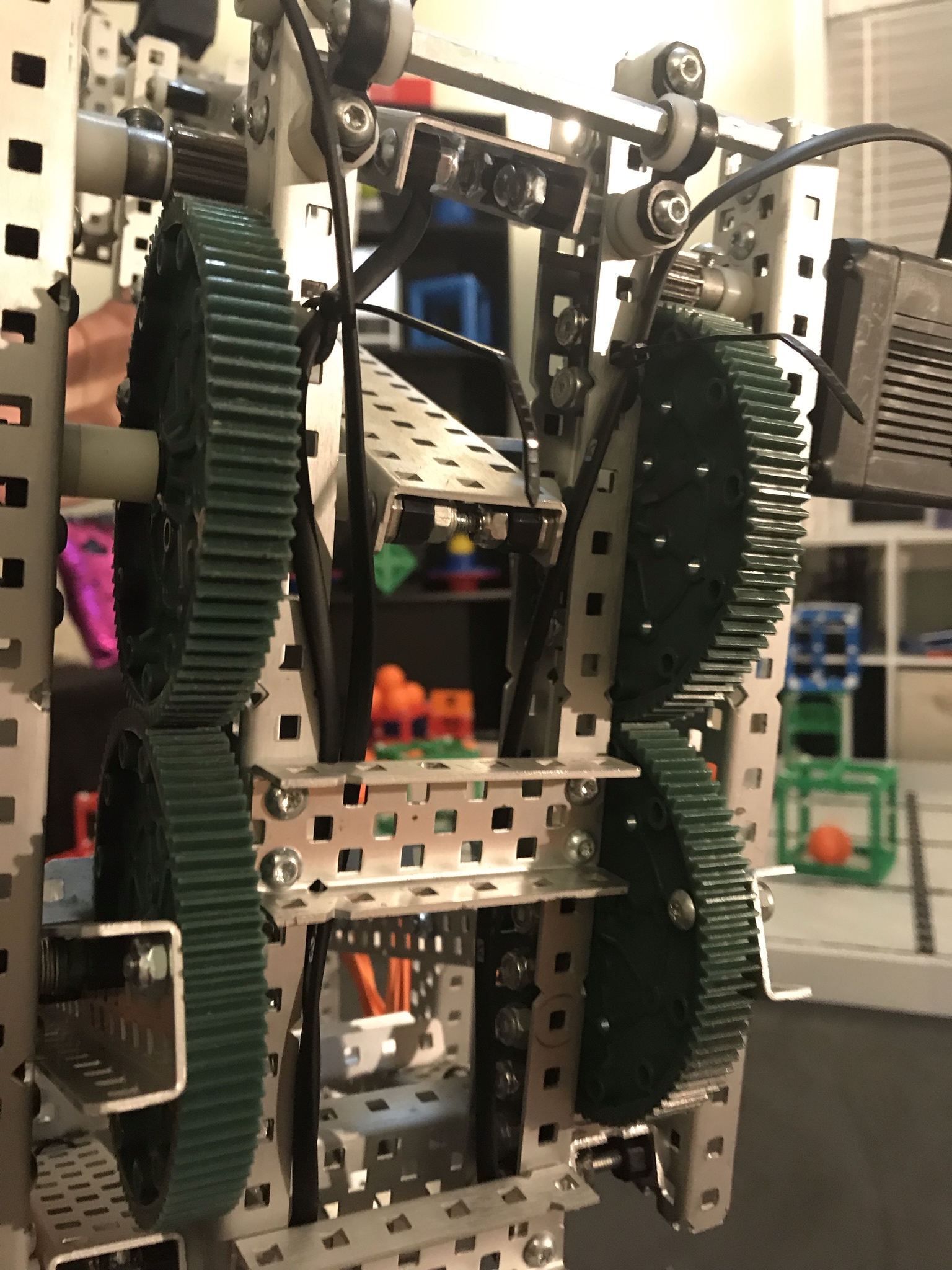
are the rubber bands positioned on spacers? correct me if I’m wrong, but I’m pretty sure you only need rubber bands on the bottom 4 bar. I think making the banding only one triangle on each side and putting it on some kind of roller (like spacers) could reduce rubber band friction. You should also use lithium grease on the gears and axle.
Yes, the lift stays at it’s position without a mechanical stop when the robot is off. When this issue first occurred, the rubber bands did not pull up on the lift. We added more to see if weight was the issue before we took apart the motors.
Yes, they are on spacers. We also use lithium grease on the gears and axle of the lift. We split up the rubber bands into sections to avoid bending the screws, but i’ll look into removing some of the triangles.
Just a couple of questions - are you sure the wired are good? I bought a wire checker and had a 50% failure rate (I’m an EE). Also, I have found that certain brake types appear to cause motors to overheat. We had a problem with this last year. I think brake type “brake” with a potentiometer caused problems. To troubleshoot, I would try different brake types. That and make sure wiring is good.
We bought a wire checker after the first couple times of having electrical issues and tested them today. We also looked over them externally and found no damage to the rubber. As for the overheating, we believe we know why that happened (electricity converting to heat through the damaged circuit board), we’re more concerned about how the damage was made to the motor in the first place.
Those small C-channels you have running between the lifting arms are really unnecessary. All they do is add more weight, add more friction, and prevents you from mounting rubber bands in better positions.
Speaking of rubber bands, I would highly suggest changing to a single triangle or 2 point rubber band set up on each set of lifting arms. Having your bands stretch longer allows them to use their potential tension much more effectively and if the bands run too short you risk not gaining any extra force from them at all.
Example
This is from our TP worlds robot. By no means is this the end all be all way to rubber band, but it is certainly a fine example to use for a solid lift design.
The C-Channel running between bars are supports. They significantly reduced how much the lift swayed. They are generally unnecessary on smaller dr4b’s, but this dr4b uses 35 hole C-Channel, so supports are necessary. I will look into ways we can move them around a bit, but I believe removing them completely will end poorly.
I agree that the rubber band placements are not ideal. I will definitely try changing that up.
The C-Channel running across the length of the bottom half is another support. This one helps prevent the bar it is connected to from twisting. We’ve experimented with the placement/removal of the bar, and noticed that it also helps decrease sway in the lift.
Weight shouldn’t be the issue we’re having. 2 V5 motors with 100 RPM Cartridges and geared 7:1 should more than be able to handle its current weight, especially since the rubber bands hold it up.
do you have any videos of the lift raising and lowering? There doesn’t seem to be any huge problems besides the banding (which is a small issue i think).
Sorry for how blurry it was, the reflection of the board made getting a good image difficulty. I can try again tomorrow if this image isn’t good enough.
The damage is down and to the right of C14 and R12 (the gray area).
We came to the conclusion that the motor was overheating due to it getting hot, and lowering the max output of the motor in the same fashion a normal motor overheating did. The motor is still functional, but cannot be used much before it gets hot. We opened up the motor 45 minutes after shutting off the robot, and the circuit board was still radiating heat.
I don’t see anything unusual around C14 and R12, that’s just normal flux residue.
So from completely cold, how long before the motor overheats ? Once the motor gets that hot, it’s quite normal for it to take 30-40 minutes to cool down again (back to ambient temperature)
sounds like overheating which i believe is from strain on the motors so try to rearrange the rubber bands and try going from c channel between the bars to a x brace along with trying to remove as much weight from your lift as possible
I understand that the c-channel on the lift bars are support, but cross and/or horizontal bracing is much more effective as it requires a few number of segments which reduces “slop” and weight.