24C was planning on attending the HZR September Scrimmage this past Thursday, and afterwards we were planning on revealing our new robot design. However, that event was canceled. But we decided to reveal our new design anyway. So, here it is. Enjoy!
After the REX tournament, we decided to modify our robot to be a design similar to what 24A had built. The concept was to have an intake with a wide vertical wheel roller (no longer the “chainsaw” type of intake we used on the first robot), to pull the sacks in from above, and have a bed of tank-tread running the opposite way underneath, to help pull them in. The tank-tread would keep the sacks from collecting at the front of the intake while we were picking them up, preventing the “in, up, over, and out” problem with vertical wheel roller intakes.
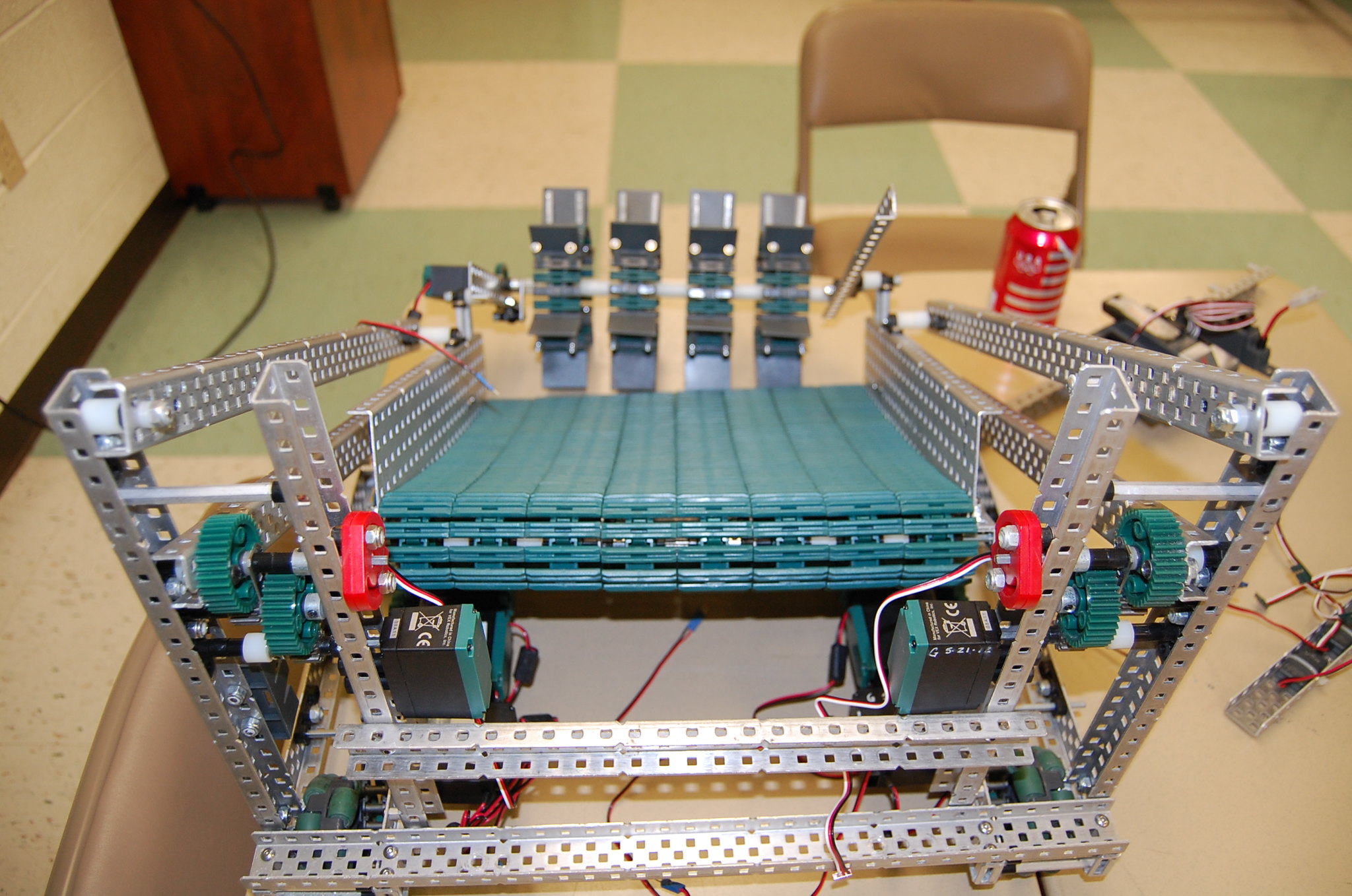
Now, this was not the only change we made to our robot. In fact, since the REX tournament, 95% of the robot has been completely rebuilt. The drive is brand new, which is now using four 2.75" omni-directional wheels, at a 1:3 gear ratio (still using six 393 motors). We were able to use each of the 4-bar systems we had on our old robot, but they were moved much further apart, and still had to be modified.
Okay! Now for pictures! (Probably the only thing many of you want to see, anyway. :P) Click them to see full-size.

Full view of our new robot.

See our new drive.
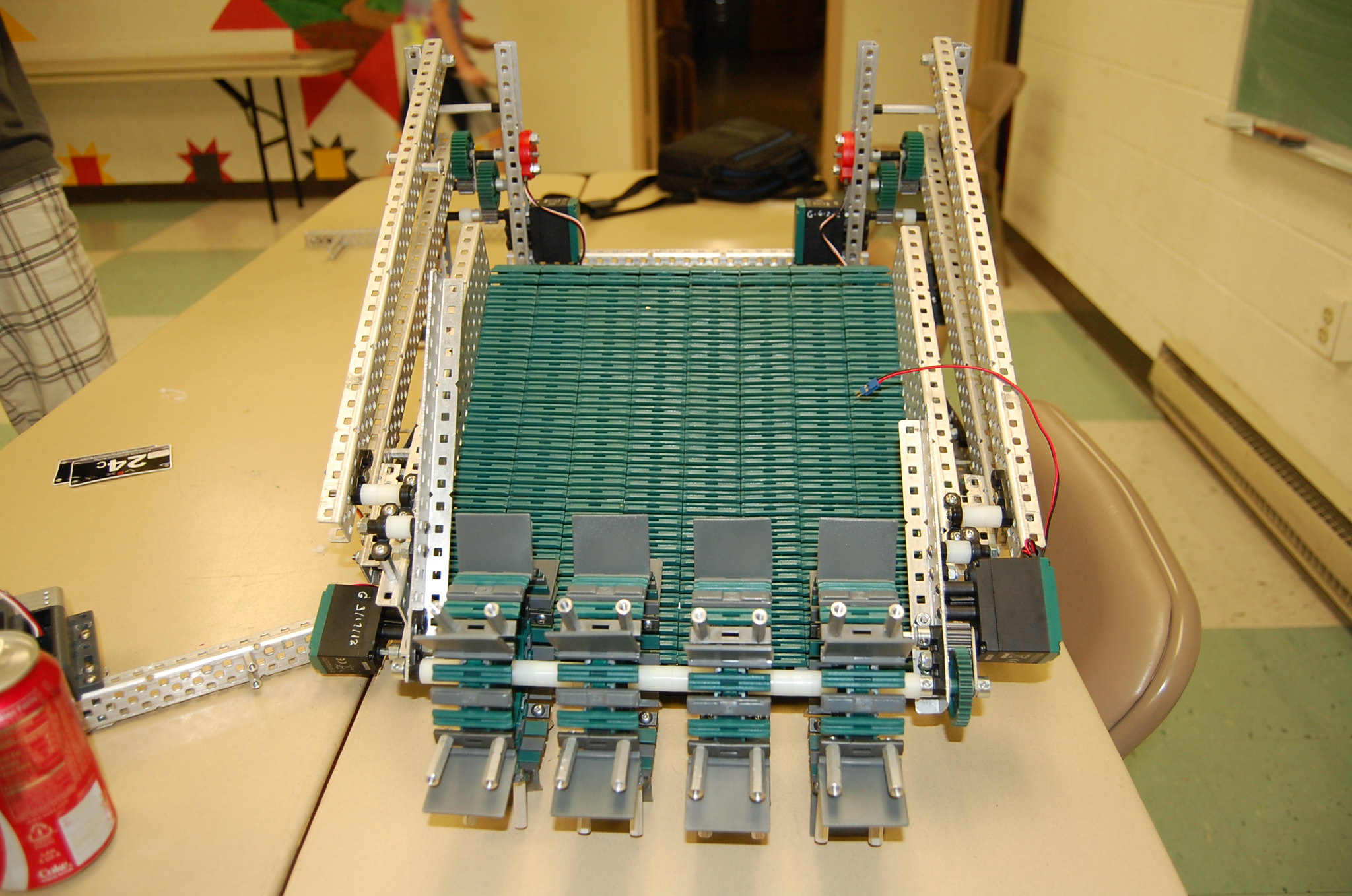
Very wide intake, for quick “vacuum de-scoring.”
And finally, a back-view.
This Monday night, we are hoping to finish up the robot, so we can begin programming, and test-driving. If I can get a video of it, I will try to post one as soon as possible.
We hope that you like our reveal, and would like to thank you for viewing it! If you have any questions about our new robot design, please feel free to ask; I will try my best to answer.
~Jordan