I have a first year team. Their thoughts are a 6 wheel drive, omni on each end, the center is a sprocket covered with chain and then the high traction rubber over it. They like the slight offset of the center wheel. And that’s not the issue.
Issue is how to drive it. Their current thinking is drive each side with two motors. The easy design is to put sprockets on all the wheels and connect them via one circle of chain. For the center wheel this has about 4 teeth on the top and 4 on the bottom catching the chain.
I have experience with chain from a few years ago, but want to hear current science based experence on your driving multiple wheels with just a single chain. In FRC, it works, but not sure if the plastic chain will manage it.
I don’t have much experience with driving multiple wheels with chain, but last year I experimented with powering multiple rollers on my robot with one motor (only difference is that this was vertical, yours I presume is horizontal). I found that the middle roller being powered often skipped and would not move. Now, tightening the chain fixes the problem, but having too tight of chain is going to some strain on the sprockets, from what I’ve seen.
In a horizontal application, I’d assume the result would be fairly similar, but I’m not sure. I hope this helped in making a decision!
you can power a 6 wheel drive using only one chain per side (by adding chain tensioners). The chain tensioners allow more chain to be in contact with the link. You can check out 240P’s TP robot reveal which did this:
And seeing @Noah10851B post here reminds me that I can prototype in VIQ quicker. I’ve got a two week old team with a mid Nov event, so not a lot of time for them to experiment, but I also don’t want them building a mentor bot.
I would do 84-36-84-36-84, with the 4" wheels on the 84 tooth gears, and 600 rpm motors on the 36 tooth gears, for a speed of 257 rpm on 4" wheels. This is a very nice drive, and is about as compact as you can get from a 3 wheel 4" setup.
Alternatively, you can run the same gearing, but direct drive the 4" wheels with 200 rpm motors. This will give you 200 rpm on all the wheels.
Hope this helps.
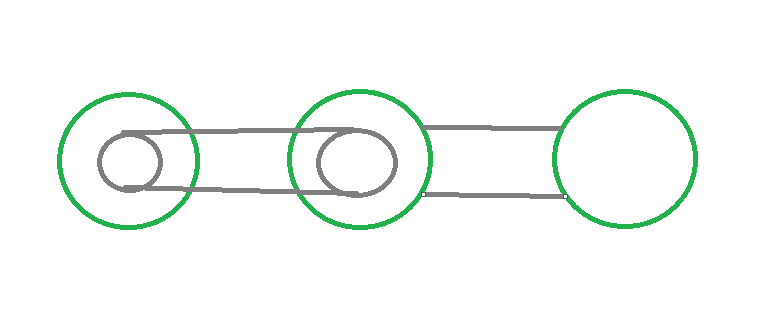
Edit: The other option, if you want to use chain, is to use 2 loops of chain, one that connects the back and middle, and one on the other side of the wheels that connects the middle and the front, like this from the side: