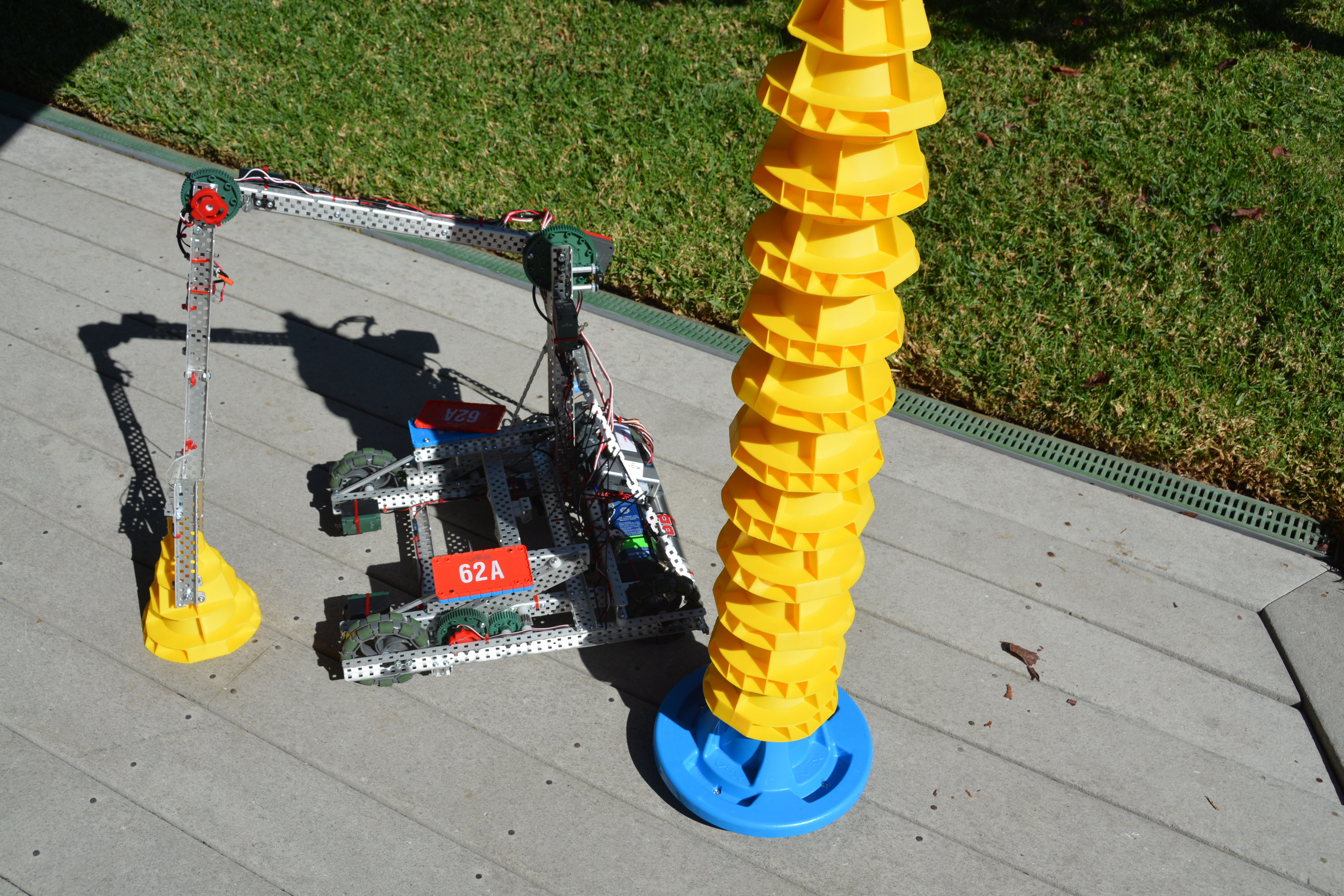
The goal of this robot was to create a very low lift mass/load ratio, as well as hopefully convert some people from the overbuilt, unneeded lift capacities of a rd4b.
Specs:
1 Piston “pad roller” intake (as seen on ri3d)
4 motor 4" HS drive
2 motor 4 bar mobile goal intake
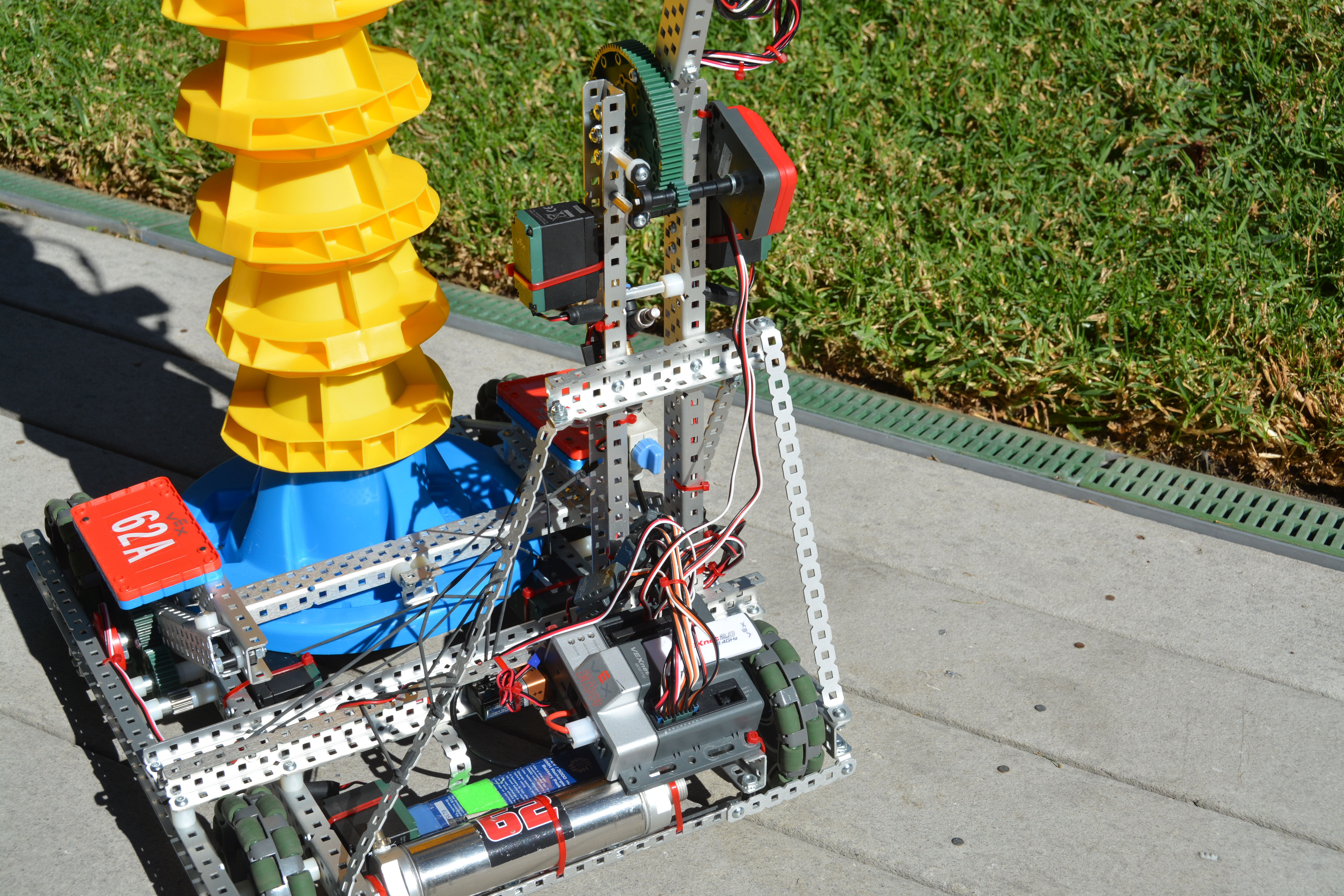
3 motor “Schlucas” arm
2 motors 1:7 HS stage 1 arm (Quadrienture encoder controlled)
1 motor 1:5 HT stage 2 arm (potentiometer controlled)
12 cone capability
Feedback after first competition*
Pros:
super light (≈8lbs with no battery), resulting in a super fast and nimble drive.
Mobile goal intake worked amazingly
Lift worked very well
Cons:
intake could use some more work
the lift was only run at 60% speed due to lack of tuning time
The main takeaway was that the lift worked very well, even despite our main concern of the rotational torque applied by the cone causing the position to be off. However, we found the arm to be much stronger than previously thought. This is a fairly simple robot to build, however, it does take some programming skill. If you know how to program using PID and your considering a rd4b, maybe try this instead
Oh wow that looks amazing.
I kinda want to do something similar now assuming I could get it to stack reliably enough.
I really want to see a video though.
Edit:
After seeing some videos of it, I think that I would rather stay with something that I know will have a good scoring rate. Not sure I could match my current rate if I went with that design.
Dang that arm looks really hard to control. What is your average cycling time? (Time between grabbing cone and having gripper back to original position)
I couldn’t quite tell from the video; how did you keep the cone at the same orientation? Did you just grab it loosely at two points and have gravity reorient it?
It is a nice foray into a lightweight designs territory, and definitely shows you don’t need 12+ c-channels and 10+ gears to move 0.26 lbs cone. And, if your algorithm changes PID behavior depending on the stack height, that is a great exercise, regardless of the final performance!
Lack of hardware ground reference for the intake definitely made a difference - it could have been much more successful if there was one. You just cannot spend so much time waiting for the cone to settle.
If I was building similar robot I would include ground reference for stable intake and, probably, try to make forearm shorter and faster, while the upper arm longer (you could fit almost 29" beam in a cube).
Everybody, please, follow Cameron’s example and build lighter robots! I am sure we could achieve sub 1 sec cycle time on the cones:
Could this robot be ran with just a 2 motor lift? one on the first stage and one on the second. so you can make a 6 motor drive so you can be a pretty good stacker and a really good robot for mobile goals as you can fill almost any position in the “in the zone meta strategy”. With the two extra motors I would make the motors run 2:3 gear ratio. I think this could obliterate at competitions as it fits almost all the criteria that are in the meta (in hawaii at least).