Line Sensors to detect Ball Positions,
Optical Sensor to detect Ball Color.
Combine that info with a big of magic, mountain dew, and headaches, and you have Auto Indexing & Sorting
3 wheel Odometry using Rotation Sensors + 2.75" Omnis
We didn’t do this all on our own though, so here’s a special thank you to everyone in both the Short Circuit, and Apex Alliances for being there to bounce ideas off of.
See you at Worlds with “Curiosity” (and / or “Perseverance”)
This is an incredibly well rounded bot! The ability to score and de-score quickly, access the centre tower well, and rapidly manoeuvre the field with that x-drive makes this robot really effective. Overall, this is impressive to say the least, great job!
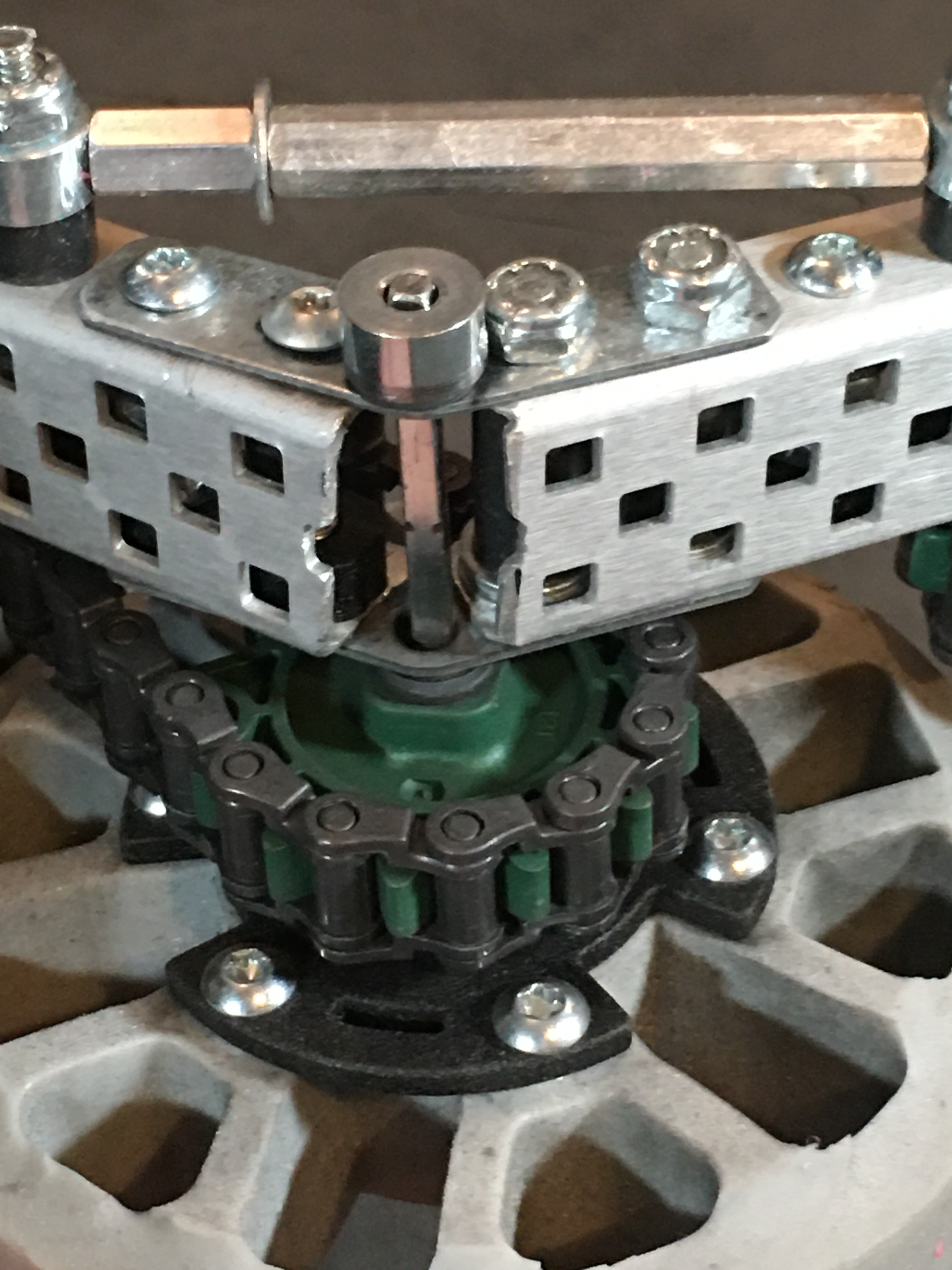
I’ve gotten a couple of messages in various places asking what the 6t sprocket on the front of the intakes are for. So here’s a more detailed answer behind the decision.
They originally had flaps on them that were supposed to help funnel the balls into the intakes for a wider intaking range, but when we changed to 4" wheels the angle from the sprocket to the wheel behind it was too great and they stopped being effective.
A picture of the intakes with flaps before we removed them.
We couldn’t move the sprocket forward, as it would stick out of the 18" starting size, so we couldn’t make them work.
When we had the flaps, I had to be very consious of how close I got to the wall, as if we were too close the flaps would rub on the wall and eventually stall the motor. After removing them, we were able to switch the front wheel’s sprocket from 18t to 12t, which took the wheel up to 900rpm. I then realized that the 6t’s location was perfect for a roller to keep the intakes from touching the wall.
I got them about a month ago, and the ones I got all work really well.
Every one of them has about the same friction, but not too much. You definitely can feel the difference trying to spin a driveshaft connected to them versus one connected to an encoder, but the ones that I got don’t have too much more friction.
I don’t know if it’s just an early batch issue or if I just got lucky, but I don’t have same issues as other people seem to have.
This is honestly amazing. I noticed you only had one of the Versa-hubs in each of your flex wheels. I never found out: Are you supposed to use 1 or 2? I originally thought you were susposed to use 2 but I only ordered 1 per wheel on my robot. Nevertheless, I should put washers on the screws like you did.
Technically you are supposed to put one on each side, but we found out this way also works fine.
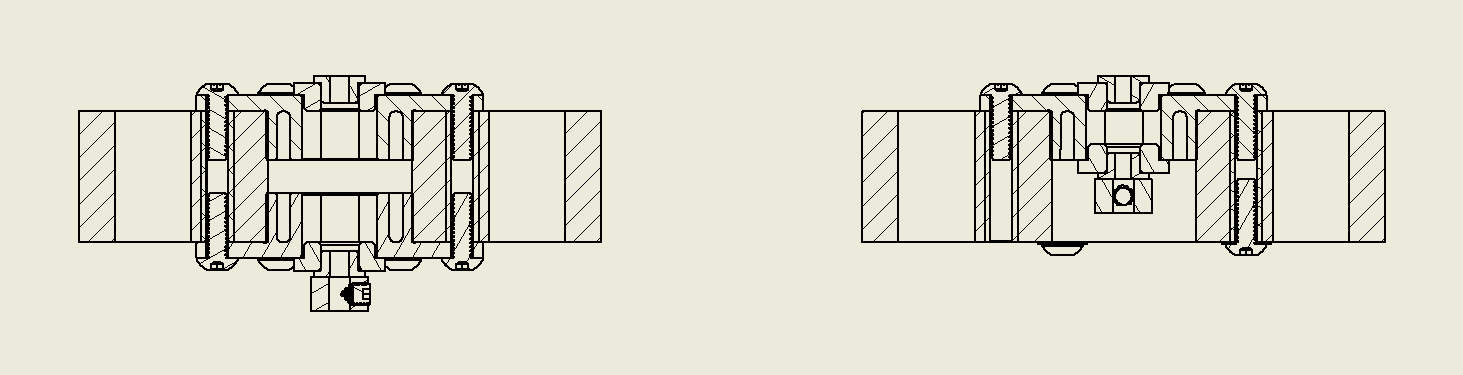
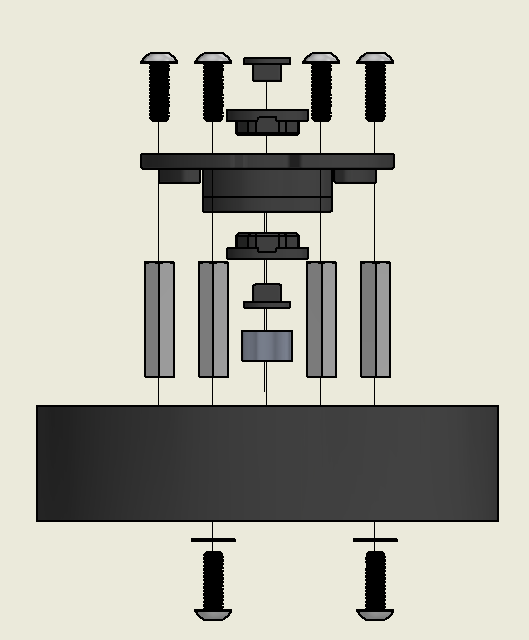
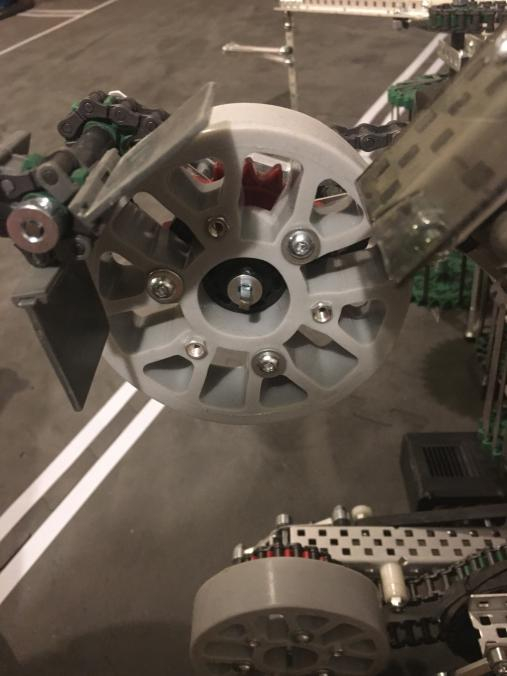
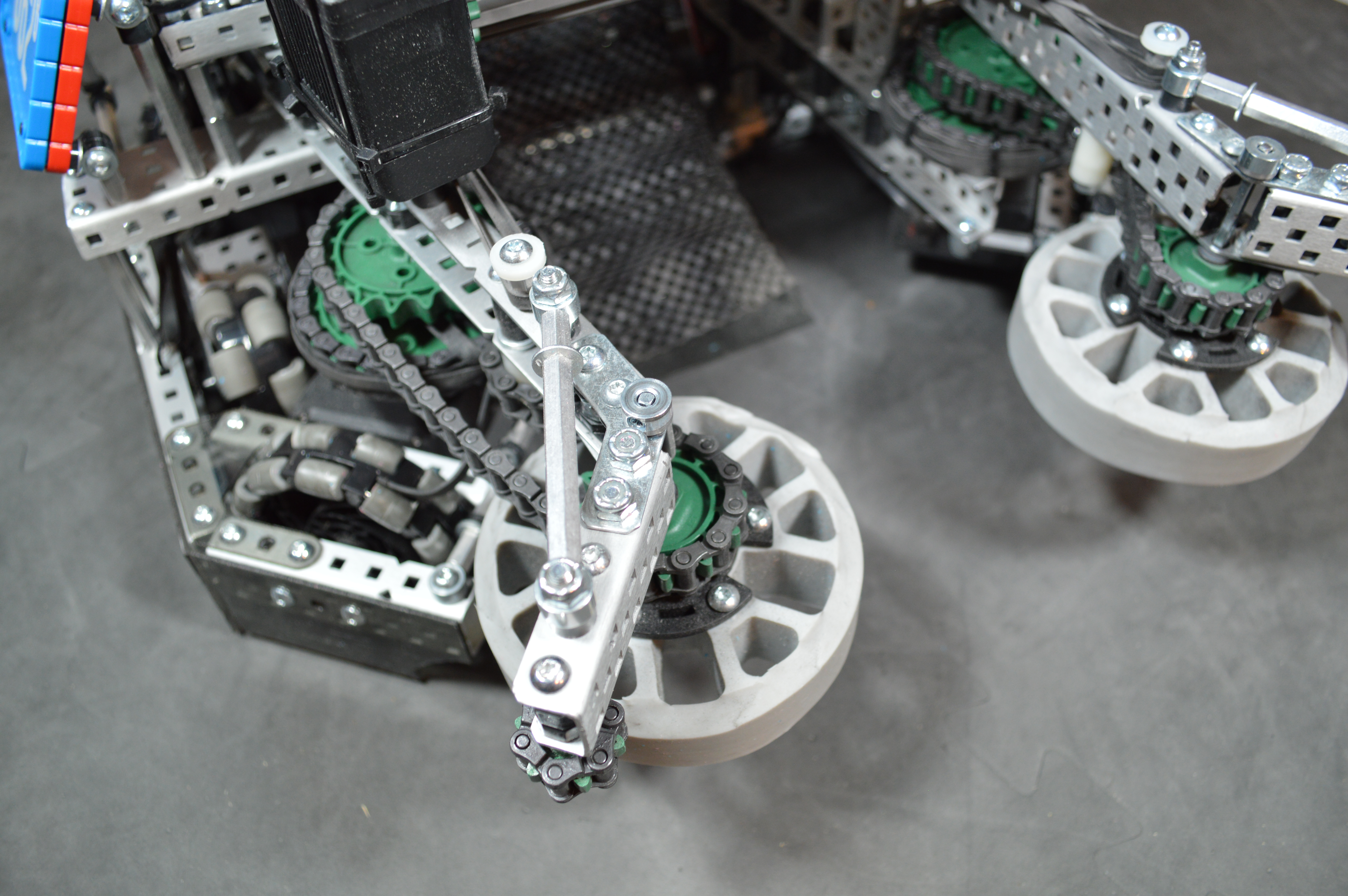
The 3 different adapters[1] you have to use to attach the flex wheels to a LS driveshaft add up and those along with a shaft collar on the bottom makes the flex wheel assembly very thick.
The way we did it was to put 2 Versahex adapters on both sides of the Versahub, and put the shaft collar on the inside of the wheel which made the whole assembly have a much lower profile (and also looks better).
[1] The 3 different adapters are: Versahub, Versahex, and HS to LS.
We didn’t need to have it on our current intakes, as there is nothing for the shaft collar to hit below the front roller. But this would help a lot if it were used on a roller that was above another part of the robot that using the first method would interfere with.
You could make this even thinner by making a custom adapter out of lexan, but I don’t have any experience with that.
E: Here’s a better view of the different parts and how they are put together
Woah. That’s awesome! Thank you! ngl I will probably adapt my current mounting to be more similar to this. The standoffs are a good idea to reduce the size too. Thanks!
I liked how at the beginning the flap is stowed inside the “tube” where the balls come out, and how fast the robot can set everything up and start scoring really fast.
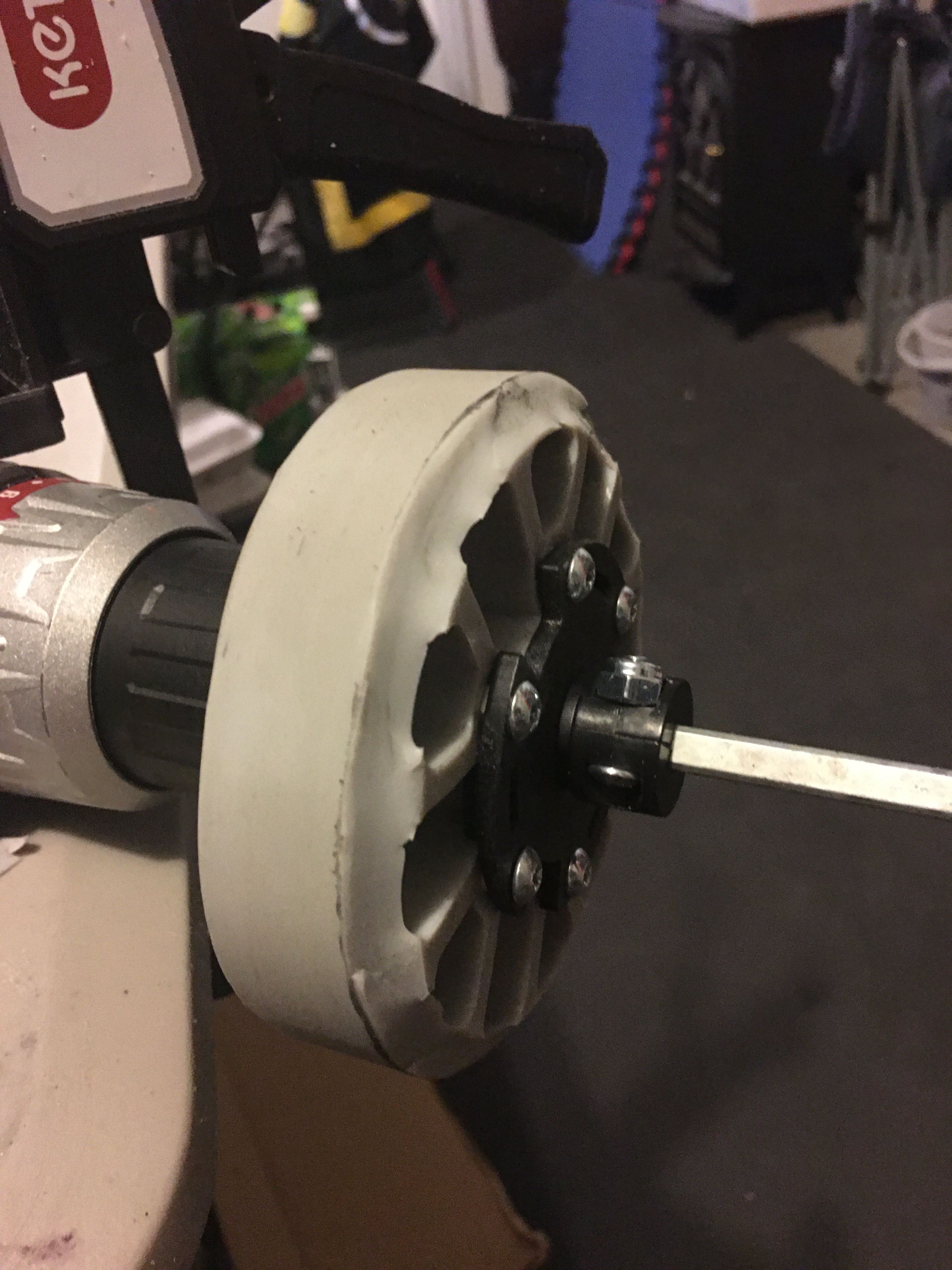
what did you use to shave off the top of the flex wheels, and I know this is kinda rookie, but how did you guys get the text looking so nice on those lexan sheets?
(After cutting)
The driveshaft was put into a drill because we tried to file the wheel while spinning to make it smoother, but it didn’t work that well.
Sorry to bring this back up, but are those custom lexan angle gussets on the x-drive?
Edit: Also, around 1:30, the flex wheels look like they are wobbling on the intakes. would that have something to do with the one hub assembly on the flex wheel?
I wouldn’t recommend doing this if you are designing your intakes from scratch. This was supposed to be a quick temporary fix, but we never rebuilt our intakes as they have been performing pretty well.
In general you should use bearings to support a driveshaft to get rid of friction, this way causes unnecessary metal-on-metal friction and has a lot of wobble.

")