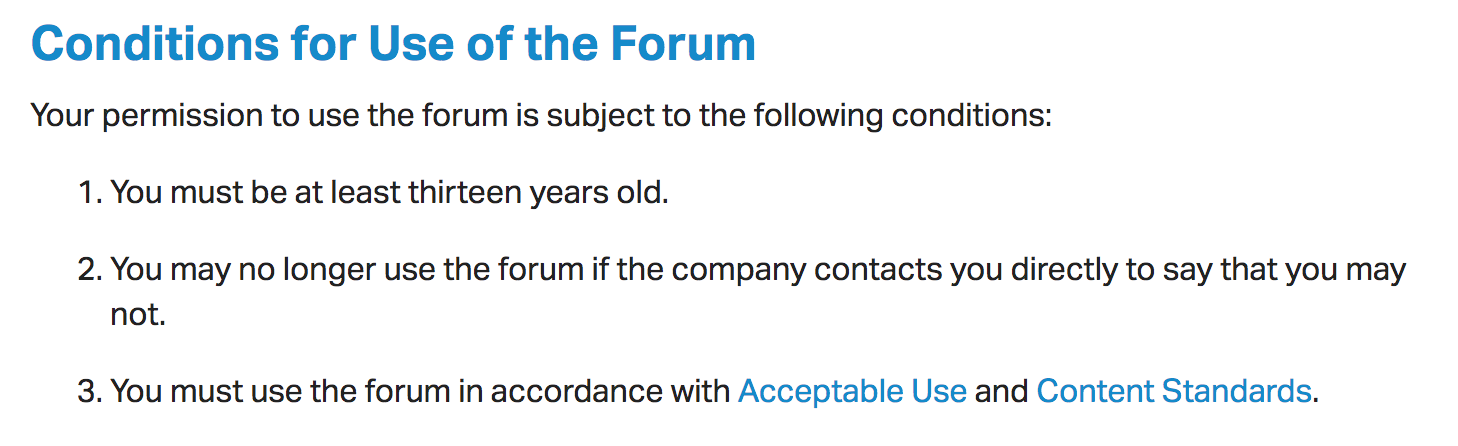
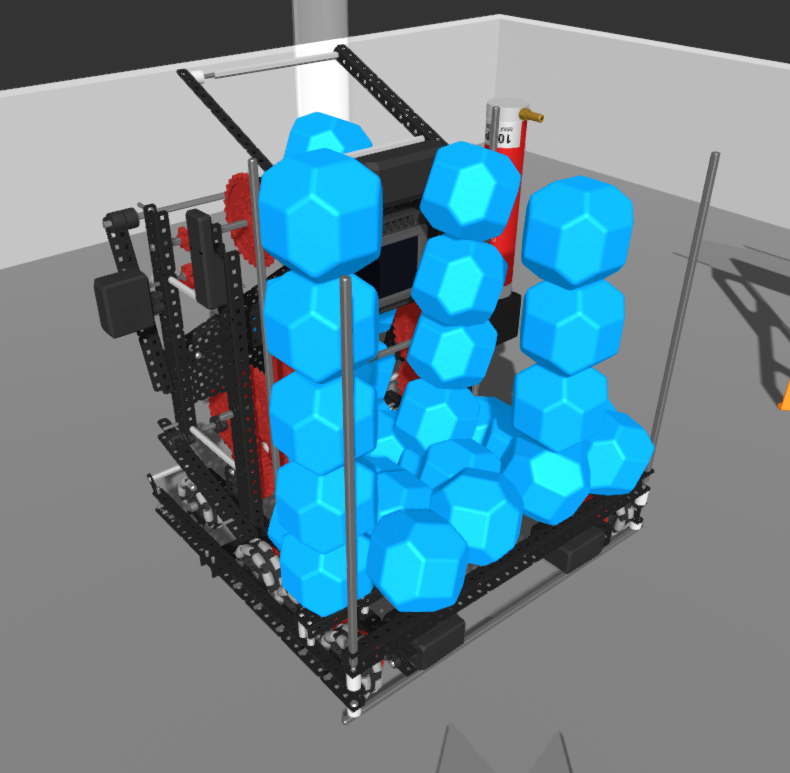
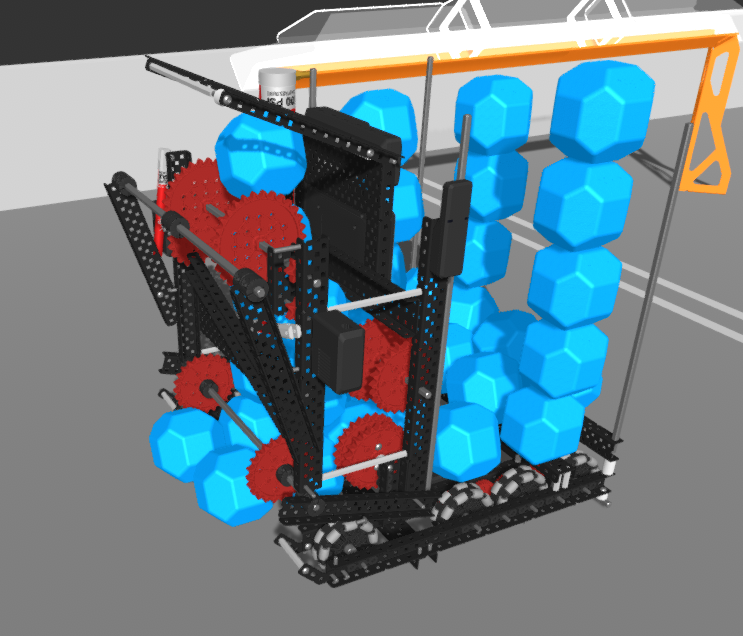
This is my second design for Push Back. It’s a bit over 13 pounds, with 600 RPM drive on 2.75 inch wheels. The capacity is 73 blocks, which I believe is the most any robot can hold so far. I can post pictures to prove how many blocks it can hold later if someone wants to see.
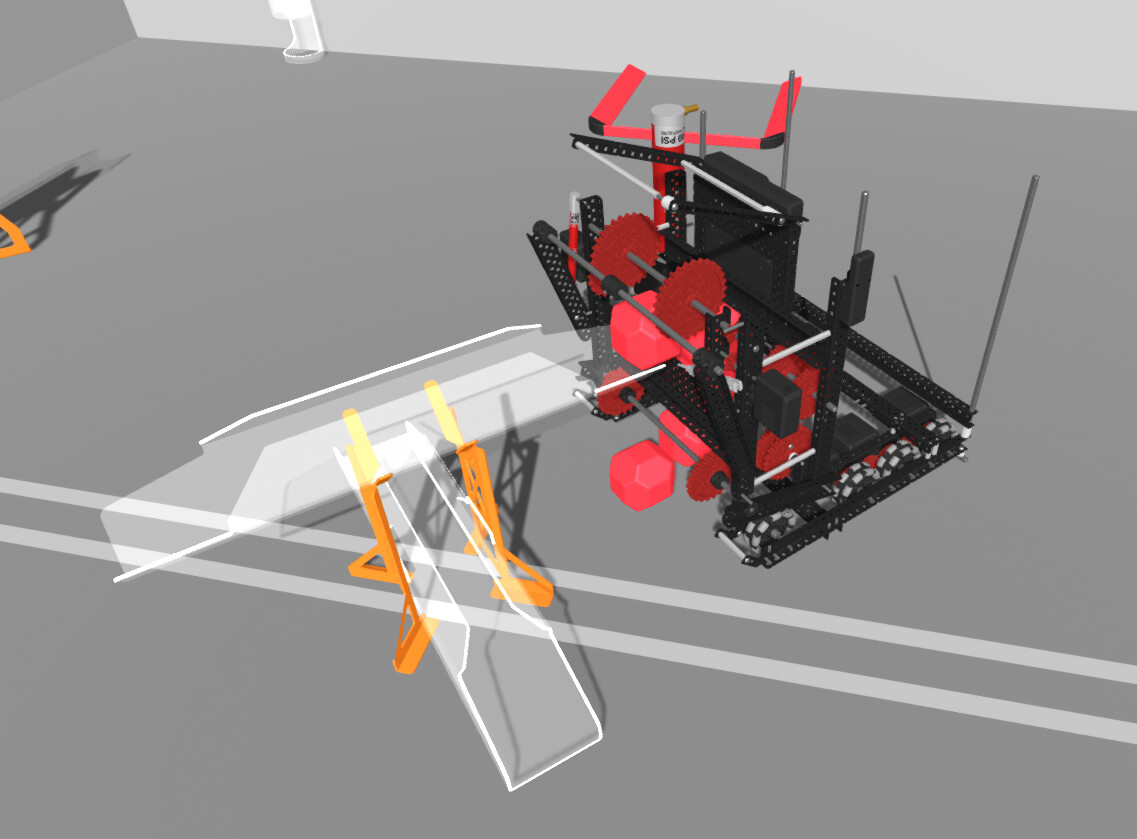
You can count the holes, 17.5x16.5 inches. Or you can just ask me. Because we are in the same room. Because you are my brother. Don’t make posts just for the sake of making random posts.
You are running 600rpm with 2.75" Omni’s. A - Do you think that will be fast enough (compared to other robots). B - Do you think a 500rpm with 2.75" Omni’s is going to be to slow?
It’s about 10 in/sec faster than 450 3.25, the most common speed, so it should be fine.
What ratio gives 500 rpm?
Your user name suggests you may not meet the terms and conditions to be using the forum.
edit: looks like the user advertizing they were a sixth grader has deleted their account now.
27 Likes
@60_Percent_C_Channel
600rpm*40t/48t
40t on Motor, to 48t on Wheel. (Sprockets btw, for comparison ignore that sprockets are bad)
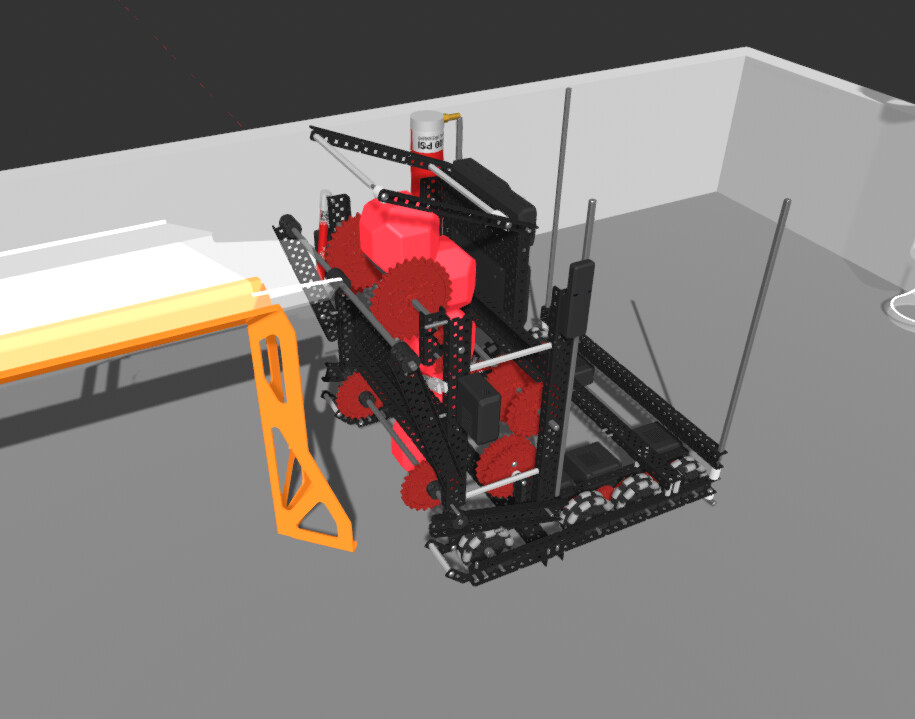
What are the pneumatics for?
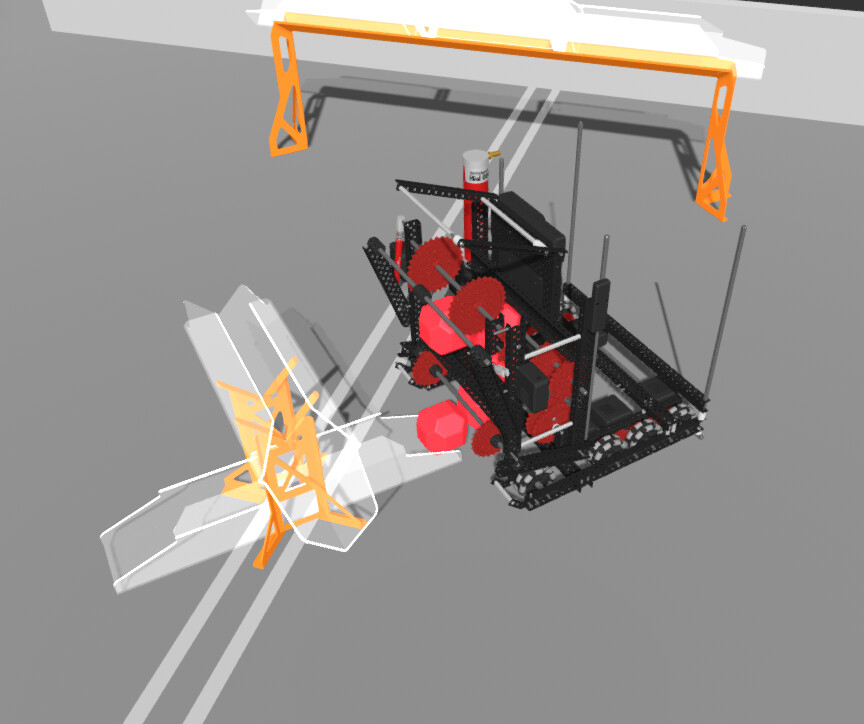
How is the front bar (for getting matchloads) moved up and down?
There’s a piston on the other side of the robot. You can’t extend pistons in protobot, so that’s why it goes down but the piston doesn’t.
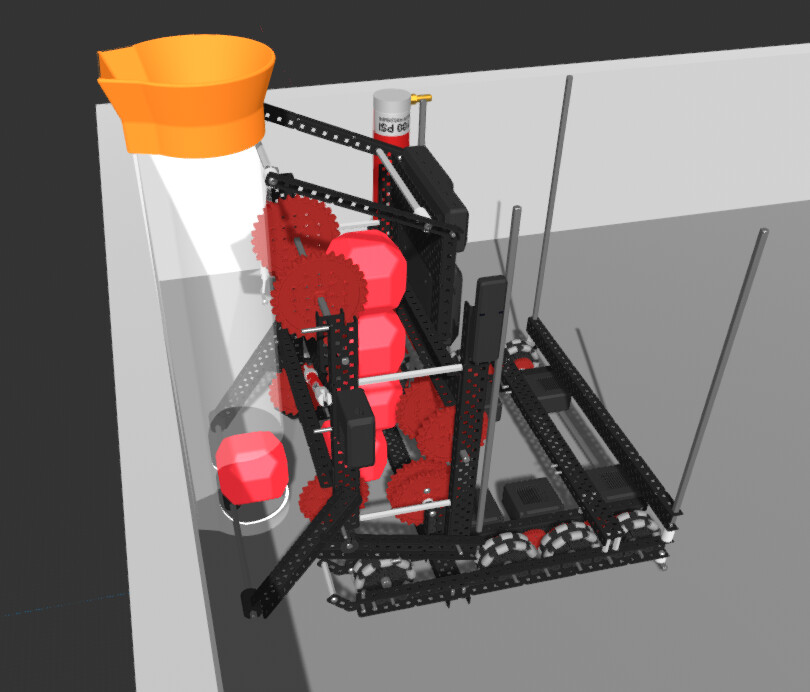
How in the world does this hold 70 blocks? Can you provide a picture?
There are no 40t gears. Or 48t sprockets.

3p sprockets are awful, and you should never use them. The chain loves to break and slip under any torque, so you should use them even less on a drivetrain.
After Blank’s Beginnings, I do have my reservations towards hoarder.
The one and only hoarder in the scrimmage did a decent job in going around to collect the blocks in the open field.
But the opponents are aware as well - they seldom give the hoarder opportunity to score.
Hoarder on its own, can’t really win a match.
But I do think it still might make sense when alliance with the right partner.
I agree that there will be a decent amount of defense played on hoarding bots. However, that was happening with every bot at Blank’s Beginnings finals. The only common reason to use a hoarding bot is to score full long goals quickly, and a less common one is to take all of the other alliance’s blocks. What I noticed from watching Blank’s Beginnings finals was that 8059A, in both match 1 and 2, had enough time to score a full long goal if they had been able to hold 15 blocks. I do think that 73 will never happen in a match, and the late season meta will be smaller and faster with faster scoring and capable of holding 15-30 blocks.
@Singularity_Robotics I’ve done testing with these and they are very underrated. Through my experience they actually can hold together under high stress. They do tend to slip and break when the chain is not in tension, but if you keep them in tension they work really well.
You may have a point. However, I believe sprockets should never be used on a drivetrain due to slop and chain being generally unreliable. If you are looking for 500RPM, I would recommend either 450RPM instead, as it is very close or a 5:1 ratio, as seen in this picture.

The spacing would be pretty tight, and I wouldn’t do it myself, but at least it’s better than sprockets.
Based off the gearing you would have to use a 100rpm motor cartridge to run at 500rpm which would be quite unconventional and introduce extra drag from the motor compared to a 600rpm carriage. 450rpm is definitely more obtainable with 600rpm cartridge as you can gear down the motor with a 36t gear driving a 48t gear on the wheel.
@ChicknCoop
Rather, I would use a 600rpm and gear it down to 500rpm.