<SG6> Robots may not intentionally grasp, grapple or attach to any Field Elements or the opposing Mobile Goals.
In several GDC decisions the term grasp or grasping is used to define the boundary between legal and illegal behaviors. In this response, “We will be using standard dictionary definitions of these words.” Merriam-Webster defines grasp as “to make the motion of seizing, to take or seize eagerly, to clasp or embrace especially with the fingers or arms.”
This seems to conflict with several rulings made by the GDC.
First:
Seizing is defined by Merriam-Webster link as “to take possession of, to take prisoner”
Doesn’t the standard definition of grasping = seizing conflict with any mechanism that possesses or imprisons the opponent’s mobile goal?
Second:
The standard definition of grasping includes both a finger pinching motion as well as an arm (embracing) motion.
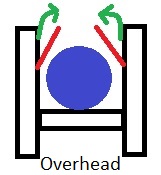
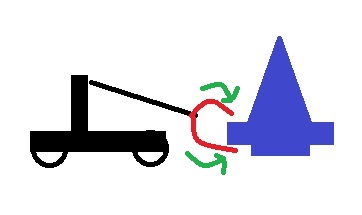
Does the rule prohibit both forms of grasping (images attached)?
Could you please help me understand the definition of grasping the GDC is using?
The full text of SG6 is quoted below, with some portions bolded for emphasis:
In addition to “grasp, grapple, or attach to”, you can also look towards the key words “latch onto” and “anchor” to help understand the intent of this rule. Some additional synonyms that are covered by the intent of this rule are “grip”, “pinch”, or “clamp”. These are all terms that describe active retention of the field element or opposing Mobile Goal, such that a robot mechanism is actively exhibiting force on multiple sides of it.
On the other hand, it is possible to “push”, “encompass”, or otherwise passively manipulate something without “clamping” to it. This is why scenarios like these are considered legal:
To answer your specific questions:
The first image (the “claw” representation) would not be legal.
The second image (the “U-shaped robot with red flaps”) would be legal if the “flaps” did not exist or were stationary.
However, the second image would not be legal if the red flaps actuated inward (as shown by the green arrows) and “locked” the goal in place.
 [attachment:59c6720a3544b]
[attachment:59c6720a3544b]