Do you have a personal device where you can watch YouTube?
You are allowed to use YouTube, it may be blocked on school devices.
If you want to be good or great, you must put in your own personal time to work on this.
Do you have a personal device where you can watch YouTube?
You are allowed to use YouTube, it may be blocked on school devices.
If you want to be good or great, you must put in your own personal time to work on this.
I don’t think it’s ever a good idea to build a hero bot. It takes away the creativity and problem solving aspects of building a robot. Building a robot involves taking your own ideas and inspiration and creating them. I would advise looking through this forum for any ideas that you like, and come up with your own designs for your robot.
i agree with this as the herobots are almost never goood enough to be even slightly competative, just read around and look at the quality drives made by @Xenon27 as they are very good examples of good bases, but dont completly copy them
Nor are they intended to be competitive. Contrary to the name “Hero” they are actually trainers specifically designed to teach novice teams basic building techniques and play the game at a mediocre level to get started. They are not, and never have been, intended for competition
I disagree, the trainers serve a purpose for brand new teams to learn the building system. We have our first year novice teams build the clawbot trainer, and if they are still not ready to go on to the engineering design process, we have them build the current seasons pre-designed trainer.
I agree with you in this circumstance. It is a great template that people can learn about Vex with. The reason I say this is that there are people who strictly just build a hero bot and don’t think about the creative aspect of Vex.
Couldn’t agree more. Started last year with neither myself or any of the students on the team having had any robotics experience, so we starting with building the (IQ) clawbot to get everyone used to how things go together. Then they took that and modified it into something that could hold its own in competition, qualified for states with it, then built a whole new design that they took to states, finished 6th, won the build award and went to worlds with.
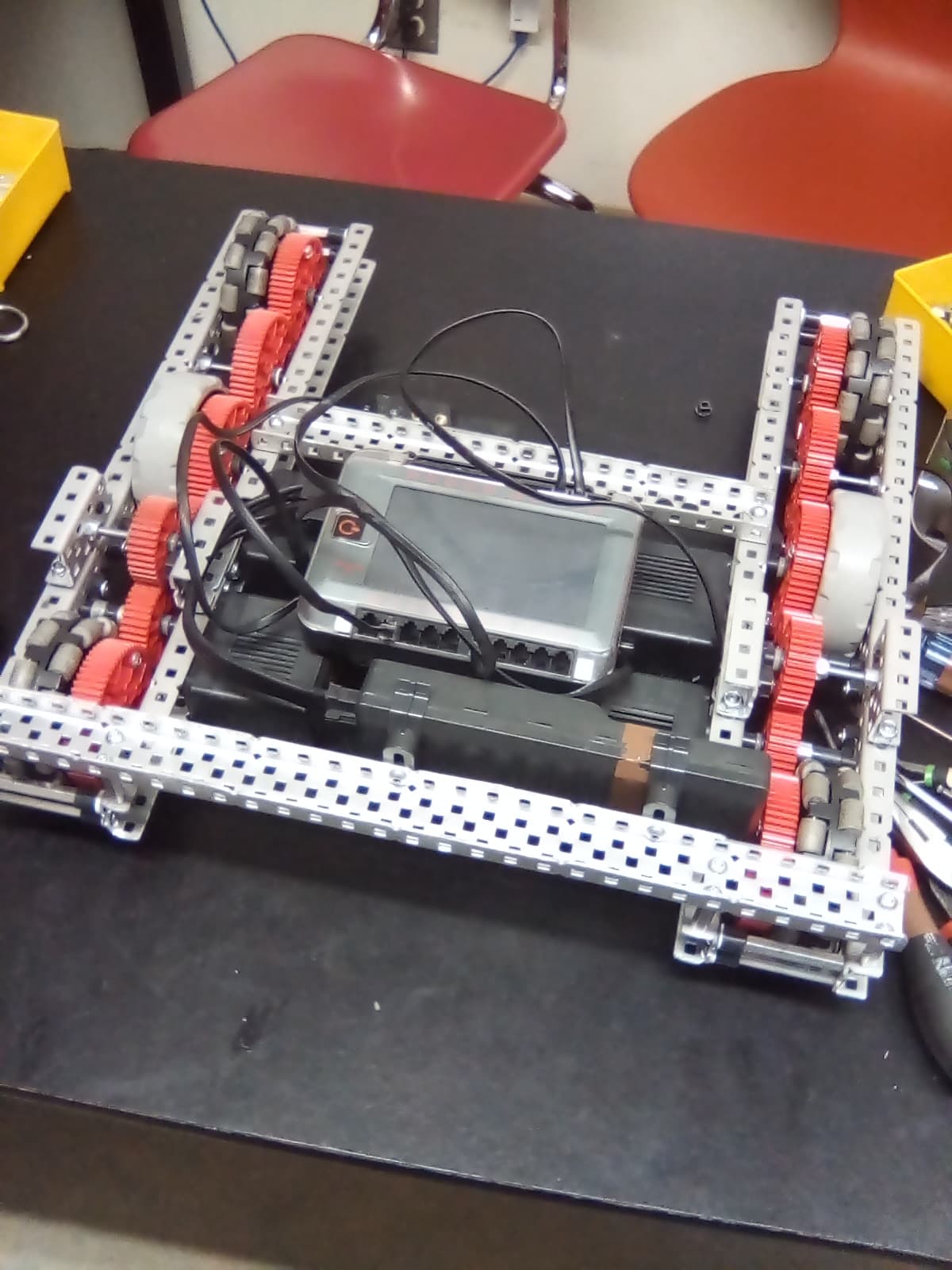
So this is a photo of one of my team’s old drivetrains. All around it’s just a decent drivetrain design, but just posting a picture doesn’t really explain why you think this is a good idea to others, which is kind of the whole point of this thread. It’s also a good idea to credit other for their designs or put a link to the original post in your post. I based this drivetrain off of one of the gearings in this post by Xenon27.
Would it be worth it to use make all wheels traction wheels to stop being pushed around by other robots.
Having all traction wheels is not the only way to counter heavy defense.
And having all traction wheels will affect your robot’s movement as well.
How else would you counter it then.
Yall The ultimate strategy is to just stay in the corner and go back and forth well the person feeds you Triballs XD
Would it be a good idea to use a differential between a 6 motor drive base and a lift for elevating.
I am hoping that you will learn to do a bit of research on your own actually.
Just make use of the search bar - type “how to play against defense”
You should see many other solutions from the previous season ![]()
Welcome to forum.
Generally, we prefer those that are new to the game to avoid dishing out advise that may not be exactly correct.
Eg. your current suggestion is definitely not answering the question of how to counter defense. The robot will still be pushed when it is at a corner or when it is moving back and forth.
One tri-ball launching mechanism that I think isn’t getting enough credit is a fly wheel design that uses flex wheels to launch the tri-ball across the field. We currently have it on our robot, and it enables us to load all 44 tri-balls for skills in 25 sec or less. If you have the wheel exposed enough you can also launch directly over other robots and maybe blockers. The design is incredibly simple, only requiring 2 11w speed motors (600 rmp), gear that for speed using a gear ratio of 84 - 36 (7:3), and that’s it. You can easily control where the tri-ball goes by using two wheels like us and putting more of the tri-ball on the wheel you want it to curve to. It’s also extremely powerful, and while first loading balls on half of the balls were going outside of the field. The only downsides to this design is that you would lose a motor that you would use for something else (if you are using a single motor cata), and it requires a lot more skill to load. But when done correctly, which I’ve seen happen, it is a menace.
Just to give credit where credit is due, we first thought of, realized, and saw the potential of the fly wheel from 4810A, a middle school team from our first comp.
Went to same comp, which team are you guys?
Hello, something I have noticed this year is how match loads are held before use compared to the height of the robot. This is even more important now that we plan to expand upwards with our flywheel. Because of this I was wonder if anyone knew weather you can bring a small stool or something to place the bin of them on. (Note: I am aware that you cannot stand on a stool during the match because it gives an unfair advantage, but I was not sure if that applied here as a few competitions already do this them selves for skills.
Our team is 19291A, and we were at the Dayton classic yesterday and were finalists. What we, and most other teams do, with our match loading is just sit on our knees, since it puts us closer in elevation to the triballs in the buckets and the robot.
Yesterday my team had our first comp and we noticed that anytime we were paired with 7830 teams we would use our shooter to get match loads over to them then once done go to the other side and either be annoying to other robots or help push triballs in the goal