I agree, during that same competition we also did this because is best fit the size of our robot, but my reason for asking this is because we plan to make use of unlimited vertical expansion for our flywheel. Which is why we might want to have them higher as their destination will be higher.
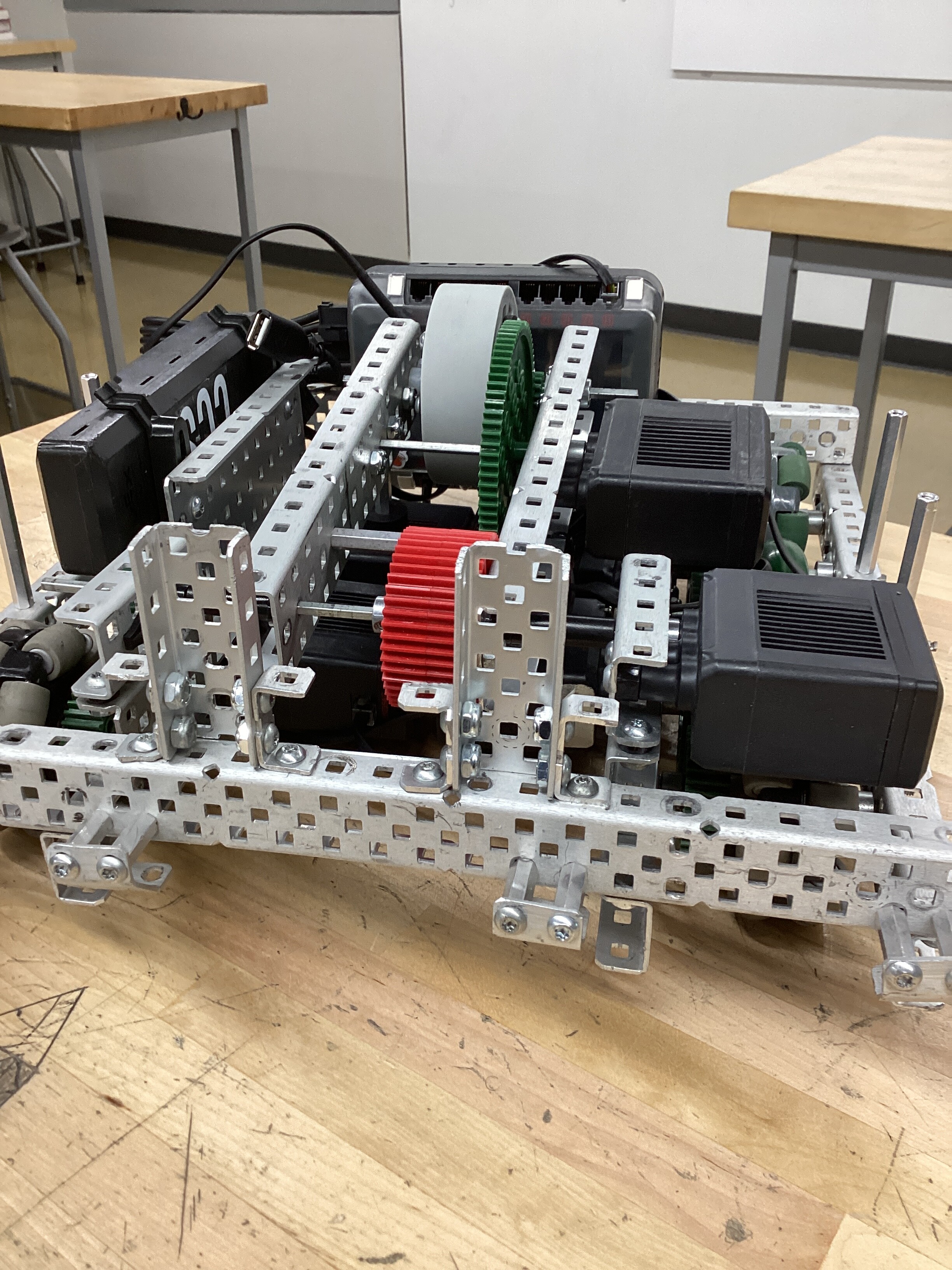
One thing that I like about flywheels, is the fact that they are so compact. Our flywheel idea came from 663C, who can lower their flywheel to go under the goal. Flywheels are the only launching mech that can go under the goal, and it has been a big help in our strategy. @Hmm_Persons, we have a 600 rpm motor in a 1:7 ratio for our flywheel. With 100% speed in our driver code, this is enough to launch across the field. Here is a slightly outdated version of our robot:
We had a catapult robot that could go under the goal. I wouldnt necasarrily say that a flywheel is the only mechanism that can do that.
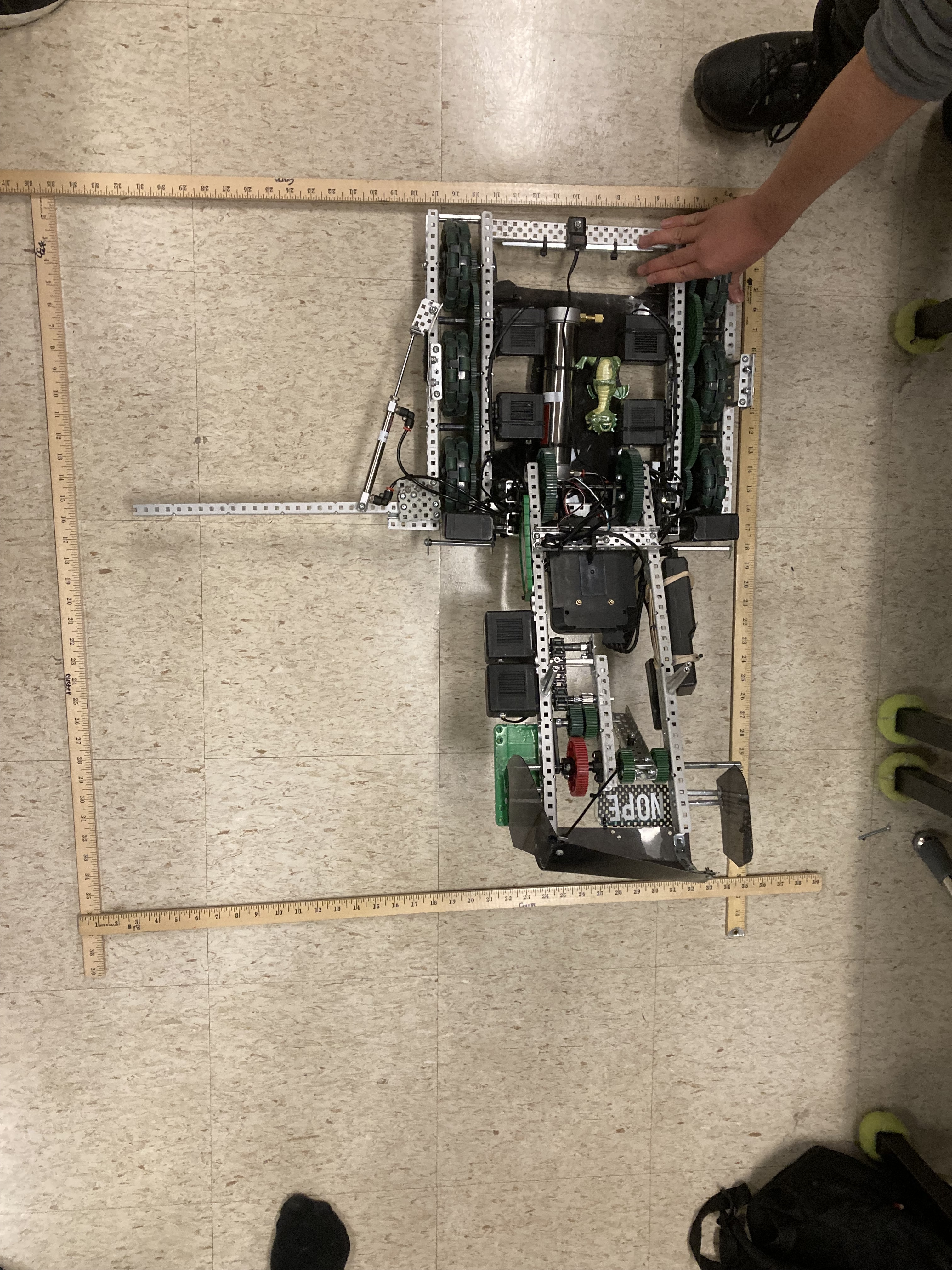
Not the only launcher, but among the most effective. We’ve created a kicker mechanism for skills that we can raise and lower, and still go underneath the barrier. The launcher is mainly for skills, but our strategy for eliminations is somewhat different than the standard we see. We embrace double zoning to launch with our partner, they start on the defensive side and we start on the offensive side (where the other team shoots)
We make our way around after autonomous and either block the other team’s launcher (depends on the launcher), or Strat shooting our 8 triballs.
Once empty, our alliance partner goes to score while we finish shooting.
This strategy counters robots that have flywheels, metabots, and double zoning completely with efficiency as long as both teams do their part, and it remains flexible to change depending on the other alliance’ robots. Not the best explanation in words, but hope it helps!
(Not the best picture, and a bit outdated, but eh)
I think that would put a lot of weight on the robot more than the power the motor is producing
Yeah, maybe when the 30-sec warning comes on you get the last triballs in and make your robot clear of any other robots in the path then at 15 sec (time to hang) you start hanging so the other team can’t get on the bar and they cant push you.