Just wondering if anyone new what the friction coefficient was of any of the vex wheels. My team has gone on summer break and I don’t have access to my workshop anymore to test this. This would really help me and my team for when we come back in September for when we design our drive train.
I’m assuming you mean on the foam playing field surface.
If anyone is sitting there with a wheel and a foam tile, this should be fairly easy to test, as all you will need is a ruler and the foam tile and the wheel (laying down will do, just make sure if it’s an omni wheel to tape the rollers so they don’t roll).
Just take your wheel and use the foam tile to see how high it has to be elevated, then from there figure out your slope and hence the coefficient of friction.
I’ve been looking for a number for a while, but I haven’t found one.
If I had a wheel and a foam tile, I’d do it myself, but we don’t have access to our parts or workspace either over the summer.
I’m confused by your method here, and think you forgot something. What do you mean by “Just take your wheel and use the foam tile to see how high it has to be elevated”?
Our team conducted a rough test with small Squarebots. [EDIT] In all of our tests we used a Squarebot with 4 of the tested wheels on it, locked so that they cannot spin. (Probably not the best way to test, which is one of the reasons why I said I’d redo them and not to use those numbers.) [/EDIT] We placed them onto a foam tile and lifting up one end until they start to slip, then taking the Tangent of the angle, and we got the following: (Though I would not suggest using these numbers – just be patient for a few more days and I should be able to get much more accurate numbers.)
5" (Diameter) Wheel: ~34°
4" (Diameter) Wheel with “Regular” Tire: ~39°
4" (Diameter) Omni-Directional Wheel: ~43°
2.75" (Diameter) Wheel: ~43°
(These were the only wheels we could test at the moment. Couldn’t find our 4" High Traction Tires, didn’t have time to test the 2.75" (Diameter) Omni-Directional Wheels, and don’t have any of the 2.75" (Diameter) Double Roller Omni-Directional Wheels.)
Now taking the Tangent of those angles gave us the following coefficients of friction:
5" (Diameter) Wheel: ~0.6745
4" (Diameter) Wheel with “Regular” Tire: ~0.8098
4" (Diameter) Omni-Directional Wheel: ~0.9325
2.75" (Diameter) Wheel: ~0.9325
Again sometime soon after this Monday I should be able to conduct much better/more accurate tests, and get more accurate numbers.
~Jordan
So is this how to find coefficient of friction for the wheels? (see attachment)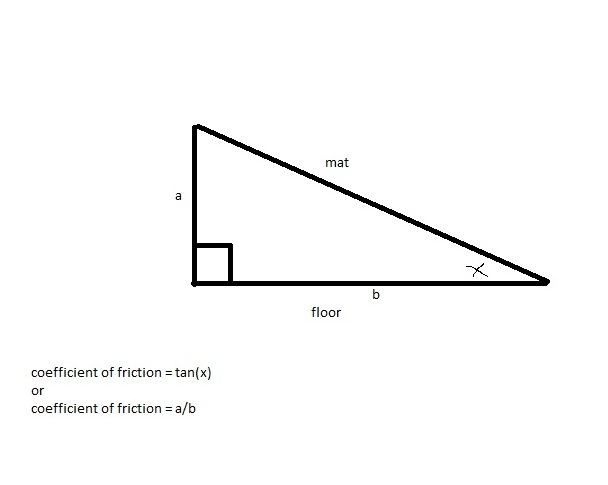
Yes! That’s exactly how you can find it. (x being the angle when the wheels start to slip, of course.)
~Jordan
Just a sugestion but while your testing you might want to try and test multiple wheel configurations. I know many teams that are looking to do a 6 wheel drive with a 4in normal wheel in the middle and 1 4in omni wheel on either side of the normal wheel. Just sayin.
Thanks so much! I completely forgot to mention that. In all of our tests we used a Squarebot with 4 of the tested wheels on it. (Probably not the best way to test, which is one of the reasons why I said I’d redo them and not to use those numbers.) I’ll edit my above post to say that.
~Jordan
To get static COF, the wheels obviously must be “locked”. They can’t rotate.
Again. Something I forgot to point out in my above post. I’m having a lot of those problems today. ![]() (above post edited again)
(above post edited again)
~Jordan
Sorry I didn’t really explain it too well, I thought it would have been straightforward as you pointed out.
The arctangent of the slope is the angle (the tangent of the angle is the slope). And it also happens to be that the slope (or the tangent of the angle) is the coefficient of friction.
This would be the alternate way to test (having a whole robot), but I would be concerned with the wheels depressing into the foam which may alter the results (may in insignificant, might not be). Also, your 4" wheel numbers got switched somewhere. I think the second set of values (the slopes/coefficients of friction) are correct, as the rubber on omnis is different from the rubber on the regular tires. I’d recommend just testing the wheels by themselves in the cases where the rubber sticks outside of the plane of the edge of the plastic (omnis and I think the 5" wheels). For the rest, a simple squarebot-type thing should work fine, assuming you’re not putting 50lbs of bricks on it…
Unless you have an instrument to measure angle accurately, I would just stick with the slope as the only value you deal with.
Also, make sure you’re taking into account which wheels are actually driven. If they are all driven, it’s pretty easy. But in your configuration, if only the center wheels are driven, you would need to figure out how much weight is on that center wheel. Optimally, it takes most of the weight and the rest are just there for stability, but that will never happen, especially with the game objects adding more weight to either the front or back set, and thus reducing the effective coefficient of friction used for traction/driving purposes.
Yep, I really did have some problems when writing that post up. Anyway I edited that post once again to correct that, and actually the first values (angles) were correct, and I screwed up the coefficients. I’m assuming that the 4" Omni-Directional Wheels have more traction than the 4" Wheels with “regular” tires because the rubber on the rollers of the Omnis is the same as the 2.75" Wheels and the 4" High Traction Tires. Either that or my experiments were even more flawed than I thought. ![]()
I actually would not recommend doing it that way. I would much rather build a Squarebot with the appropriate wheel configuration on it such that the wheels are touching the ground the same way that they would when driving. If you lay a wheel on its side it will almost definitely have completely different friction readings than it would if it were upright.
~Jordan
If you have the bot already built, or some kind of rig available, it’s always better to test something in the way it’s going to be used. But, to just get some relative values, and without having to use any set-up, just sliding the wheels should give useful data. It’s also the same rubber, and the wheels are relatively smooth from any direction, so hopefully the coefficients will be similar.
Ideally, the coefficients will be used to determine maximum acceleration possible and therefore maximum torque that can be given to the wheels, but the numbers will most likely never add up, as there are so many other factors (individual motor differences, efficiency of gear trains, friction of axles, etc.). So, getting the coefficients might only be practical to determine which wheel type will get the most traction.
Real experiments, real data; keep up the good work Jordan!
Your existing data already confirm things we know from experience:
- “high-traction” tires wheels have highest traction.
- Omni-wheels have more traction than 4" original tires.
I remember glancing at some bad math in another thread, I’ll go look for it and comment on it there.
Note that high-acceleration comes from low (torque-y) gear ratios.
Note that max-speed comes from high (speedy) gear ratios.
“wall to wall time” is one metric to evaluate the tradeoff between them.
However, placing the wheels on their side gives them a completely different amount of contact. For example, if you place a 4" Omni-Directional Wheel upright on the field, only around 3 of it’s rollers will be touching the foam tiles at any given time. However, placing the same wheel on its side causes all 12 rollers to be touching the foam tiles, and (unless you tape them such that they do not roll, like you suggested) they will all be rolling in strange and different ways.
Thanks!
~Jordan
But surface area of the contact with the ground isn’t supposed to matter (it might experimentally though). All that matters is the force of gravity on the object.
Having a frame with 4 non-rotating wheels as opposed to the same frame with 3 non-rotating wheels and the 4th one placed on top should have the same amount of friction.
Testing an omni would almost certainly require taping the rollers unless you really wanted to know how much friction there is in rolling sideways.
I don’t really see the point in finding the friction of a wheel. Knowing it allows you to either know how hard you can push opponents before slipping (given that your motors don’t trip), or how fast you can accelerate (I have no idea how you could possibly spin your wheels on foam mats with vex motors).
“The usual thing” works most of the time.
When reality doesn’t match your expectation, its a good motivation to do the math to update your expectations. Friction experiments also look good in an engineering notebook.
Friction is important in determining whether a 4 wheel skid-steer robot can turn or not, without omniwheels.
A very light 9x9 box chassis, where the motors are direct driving rear wheels with 2.75" diameter and no tires, and the battery is mounted over the front wheels, would likely be able to spin the rear wheels when pushing the wall; due to the combination of low normal force on the driving wheels, and low friction slick wheels.
You’re right to say “isn’t supposed to matter”, as opposed to “doesn’t matter”. Outside the lab, where friction consists of sliding two smooth, non-deforming surfaces over each other, surface area and/or the magnitude of the normal force can have a significant impact.
Consider a cat climbing up your leg. It’s paws slip and it is a feeble, humourous attempt… until it puts it’s claws out. It is still using the same normal force, but now the surface area is reduced and that normal force is able to deform a small area of your jeans, allowing the claw to punch through and grab onto the fibres, significantly increasing the coefficient of friction.
For a more thorough discussion of coefficient of friction as it applies to robotic design, I’d suggest searching www.chiefdelphi.com for “coefficient of friction”.
Physics 11 and 12 are cool, but the exceptions to the rules you learn there are even more cool.
Jason
Claw punctures no longer rely on friction, so I don’t thats the same as a circular field foam depression vs flat surface.
Puncturing the field or game elements would be frowned on in most robotics contests.
In other examples of Vex specific exceptions to simple models:
- Titan reported 1103 robot worked significantly better with 6 wheels than with 4.
- Quad carrier worked significantly better with 8 wheels than with 4 (with 40 lbs of cargo).
Experimental results trump models.
Hey all, so I brought all the things needed to preform the tests home with me, and I’ve been testing some both yesterday and today. Here’s what I have so far:
Four 4" Omni-Directional Wheels – 0.71369498 (average of 4)
- 18.5"/25.375" = 0.729064039
- 18.1875"/25.5" = 0.71325294
- 18.25"/25.4375" = 0.717444717
- 17.875"/25.71875" = 0.695018226
Two 4" Wheels with High Traction Tires, Two 4" Omni-Directional Wheels – 0.671735301 (average of 4)
- 17.8125"/26.5" = 0.672169811
- 17.75"/26.1875" = 0.677804295
- 17.59375"/25.9375" = 0.678313253
- 17.125"/26" = 0.658653846
(Readings are in Rise/Run, to find Coefficient of Friction. Final Friction numbers are the result of the average of all 4 readings.)
I’ll post this again with more wheel tests as I finish them.
~Jordan
Which wheels are in front, Omni or Hi-traction?
I’m a little surprised by the appearance than Omni have more traction than Hi-traction tires.
As angle increases, weight distribution shifts forward (particularly with high CG chassis).
It seems like the average CoF is a weighted(!) function of the individual CoF of each tire.
It would be good if you could post a picture of your setup in action.
I’m wondering why the run numbers are not always the same?
Here is an example description of what I’m visualizing.
2’x4’x3/4" plywood with one 2’x2’ Vexfoam panel on it.
two lines on the table, parallel, 24" apart, to set the run distance as constant 24"
Plywood aligned with one line, crosses over the other line about midpoint when flat.
Builders square pointing upward at 90 degrees at the midpoint line.
Place robot on the middle of the vexfoam with locked wheels,
The rise number is measured off the builders square, from table to the bottom of the plywood, when the robot slides.
Assuming the plywood stays flat, the rise/run of the bottom of the plywood is same as rise/run for the vexfoam surface, since these planes are parallel. I also assume that the table is level.
In Theory, the mass of the test chassis doesn’t affect CoF measurement.
In Practice, Does it?
Not that the CoF data is critical, but its fun to learn about how hard it is to do experiments well, brainstorm on potential sources of inaccuracy, test the hypothesii, etc.