Every season, when robots need to maintain stable position to score and defensive play requires a lot of pushing, the question frequently comes up which drivebase is the best.
The short answer is that there is no single wheel type that is better than everything else. Each type has its own strong and weak points and you have to find one that suits your driving preferences and gameplay strategy the best.
So what are the strong and weak points of each drive type. First of all you have to consider coefficient of friction for each wheel type on the playing surfaces. This has been discussed before:
https://www.vexforum.com/t/anyone-have-friction-coefficient-of-vex-wheels/19261
https://www.vexforum.com/t/dynamic-pull-test-with-mecanum-wheels/20209
https://www.vexforum.com/t/4-regular-wheels-traction-vs-4-omnis/22206
https://www.vexforum.com/t/traction-wheels-and-omniwheels/42154
https://www.vexforum.com/t/v5-actual-use-of-mecanums/46069
https://www.vexforum.com/t/pull-tests-for-vex-wheels/20141
https://www.vexforum.com/t/omni-vs-high-traction/46851
https://www.vexforum.com/t/mecanums-v-omnis/57650
For Turning Point season, in addition to driving on regular foam tiles, you have to maintain traction on the plexigalss platform, so another set of tests had to be run.
To do that a dummy base was outfitted with four locked wheels and dragged by a luggage scales, first on foam tiles, and then across a plexi sheet similar to the platform’s surface. About 16 lb weights had been added to the base to simulate a typical robot and to get realistic depression/deformation of the foam and rollers on the wheels. Since the scales were not that accurate, the wheels in the test were not new, and our old tiles may differ from new anti-static sprayed tiles you could find at some competitions, don’t treat below results as the final answer. This test was only meant to compare specific drivetrain options we had at our disposal. In fact, I took a liberty to round the numbers about 3-5% so they look more readable:
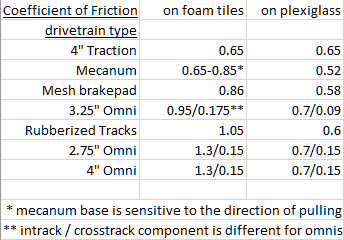
The first table shows coefficient of friction calculated by dividing the force by the base weight, which experimentally accounts for both material-to-material and rolling friction:
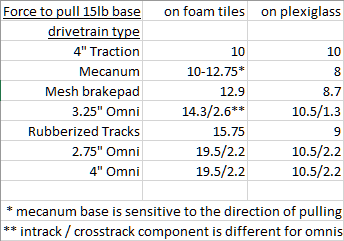
And the second table shows the amount of force (in lbf) required to pull or push a typical 15 lb robot:
This mostly confirmed what we already read in the other threads with a few unexpected results:
First of all, it is interesting that 4" traction wheels had the same coefficient of friction on the foam tiles and on the plexi. Our wheels are a few years old and round shape don’t make much step depression in the foam (like 4" omnis do) but still it seemed lower than expected.
As expected, 2.75" and 4" omnis performed very well intrack and had almost no resistance whatsoever in the crosstrack direction. 3.25" posted slightly different numbers, which could be due to the different roller size and material.
Mecanum wheels have what appears almost the same material as 4" omnis on their rollers, and you would expect them to get about 1.3/sqrt(2) => ~0.92 (see previous post), but they had 0.85 at best, likely due to the larger and more rounded roller geometry.
Another important observation was that Mecanum base was very sensitive to the direction in which you push or pull it. Even few degrees off center line would cause two of the rollers to start rolling and entire base would slide diagonally to the side with only two other locked wheels (with rollers perpendicular to the base movement) resisting the pulling force.
This makes sense when you look at the below diagram that shows that only two motors are necessary to power diagonal movement, while two other wheels’ rollers just freely rotate:
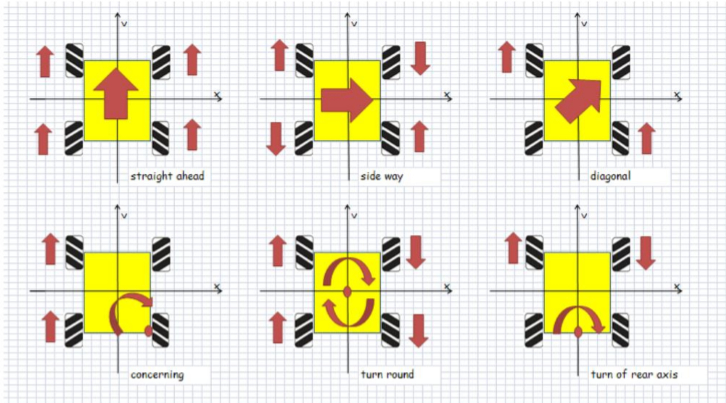
If those diagonal wheels (that maintain traction) only support half of the robot’s weight, then the total traction force is also going to be proportionally reduced.
Similarly, if you use a pair of traction wheels (or omnis with rollers locked by the screws) to resist being pushed to the side, then they are only going to be as effective as the amount of weight riding on them.
It might be tempting to build a drop-center base to concentrate most of the robot’s weight on the traction wheels, but then you may have the robot rocking while accelerating, making it harder to write predictable autonomous code.
Summary:
For playing defense or counter-defense you want to have high CoF, such that you could “convert” smallest possible robot weight into largest possible pushing or resisting force. For example, 15 lb robot on 4" omni wheels could generate 19.5 traction in respect to the ground which is just slightly more than max 18 in*lbf force generated by 4 V5 motors with 200 rpm cartridges at 2" radius.
Mecanums have very similar roller material as omnis, but they lose a portion of their ground traction (force) when wheel pairs “fight” each other rather than apply all of it towards pushing force in forward direction, like 4" omnis do (read previous post).
The best you could expect from mecanums is omni_max_intrack_traction/sqrt(2), but actual force is even smaller as force vector direction gets close to diagonal, when only rollers on two wheels could generate any traction - rollers on the other two will just free roll as they are oriented perpendicular to the force vector direction.