@Teresa_53A, yes, just like @DrewWHOOP said the best place to put motors on the full size DR4B is in the middle section.
The weight of the motors is not going to be a large factor, given the total weight of the rest of the lift.
That is usually taken care of by rubber banding the lift such that when there is no game objects it would take almost no force to bring it up, because rubber bands would counteract the gravity.
To make full size DR4B stable there are few more things that will help:
You need to link the 12T pinion gears on the left and right side with the axle, so that lift doesn’t lean to one side (those are gears that are driven directly by the motors).
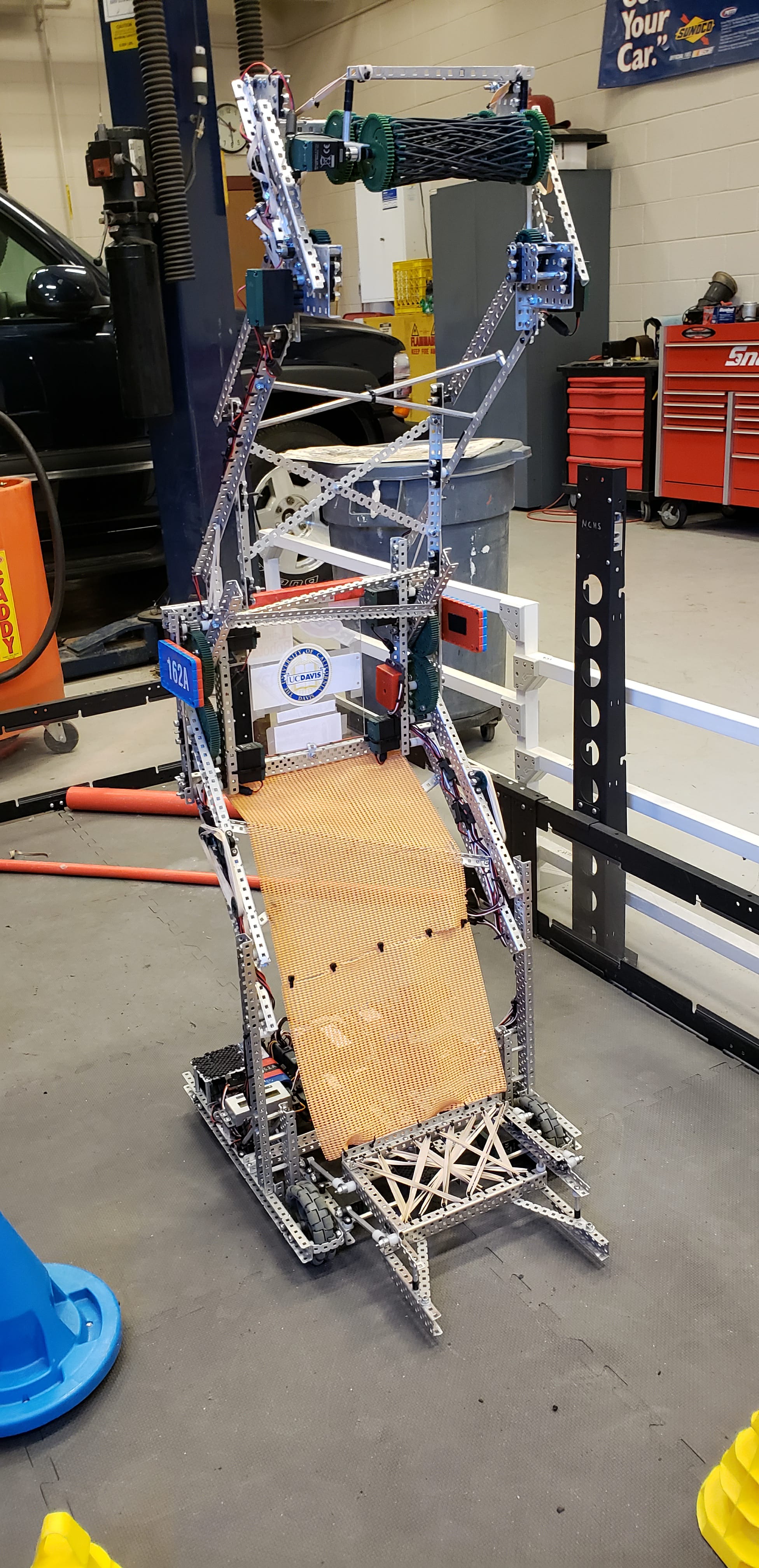
You will need to cross brace (X) the sides of the lift to make it more stable (see linked pictures below).
It is highly recommended to make connections between lift stages not with axles, but with the screws fixed with nut to one side and having minimal slop on the other moving side (tighten nylocks just enough for it to freely move but not to have any free play sideways).
Example of the well crossbraced and rubberbanded DR4B from this thread: