Hello, we are planning to use 5.5W motors for the first time this season. Specifically, when turning heavy mechanisms, instead of using a single 11W motor, how efficient would it be to attach a 5.5W motor to each end of the shaft?
You will be getting the same speed of 5.5W motor because since both motors are moving at the same time its not going to be any faster. But you will have better torque.
Untrue.
5.5W motors have significantly less torque than 11W motors. Even 2 of them will not match an 11W’s torque. (I am referring to a 600RPM cartridge torque as shown in this photo);
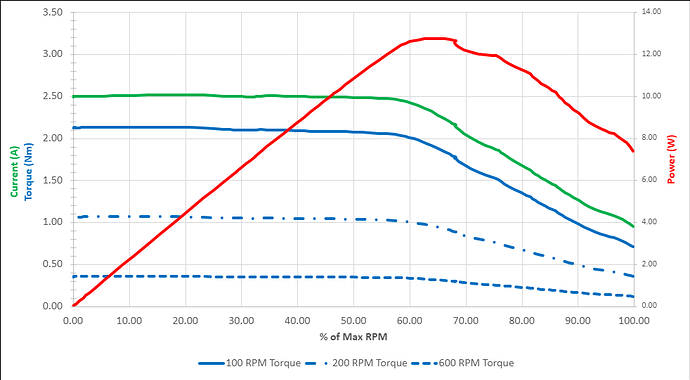
Take a look at this topic: Motor Torque, RPM, andPower
This depends on the structural strength of your robot. If your robot won’t deform due to asymmetrical loading, I would recommend using the 11W motor. However, symmetrical loading is generally preferable to loading on just one side.
Is there any reason why you would like to use 5.5w motors on each side over a single 11w on one side? The max rpm of the 5.5W motors (200rpm) would not change with one on each side, but considering this is supposed to lift a heavy mechanism, I don’t believe you are trying to reach/increase that max rpm. Adding a second 5.5W motor would provide more torque than a single 5.5W motor attached to the axle, but the torque from a single 11W motor is still greater than their combined torque. If you are trying to have more torque, use an 11W motor with either the green or red cartridge. If you are worried that the axle will twist under load or that the asymmetry of having an 11W motor on only one side doesn’t fit in your design, then you should likely use the 5.5W motors on each side.
I plan to use it to rotate the clamp mechanism attached to my Cascade lift from the inside out, but I think powering it with a single 11W motor might be unstable.
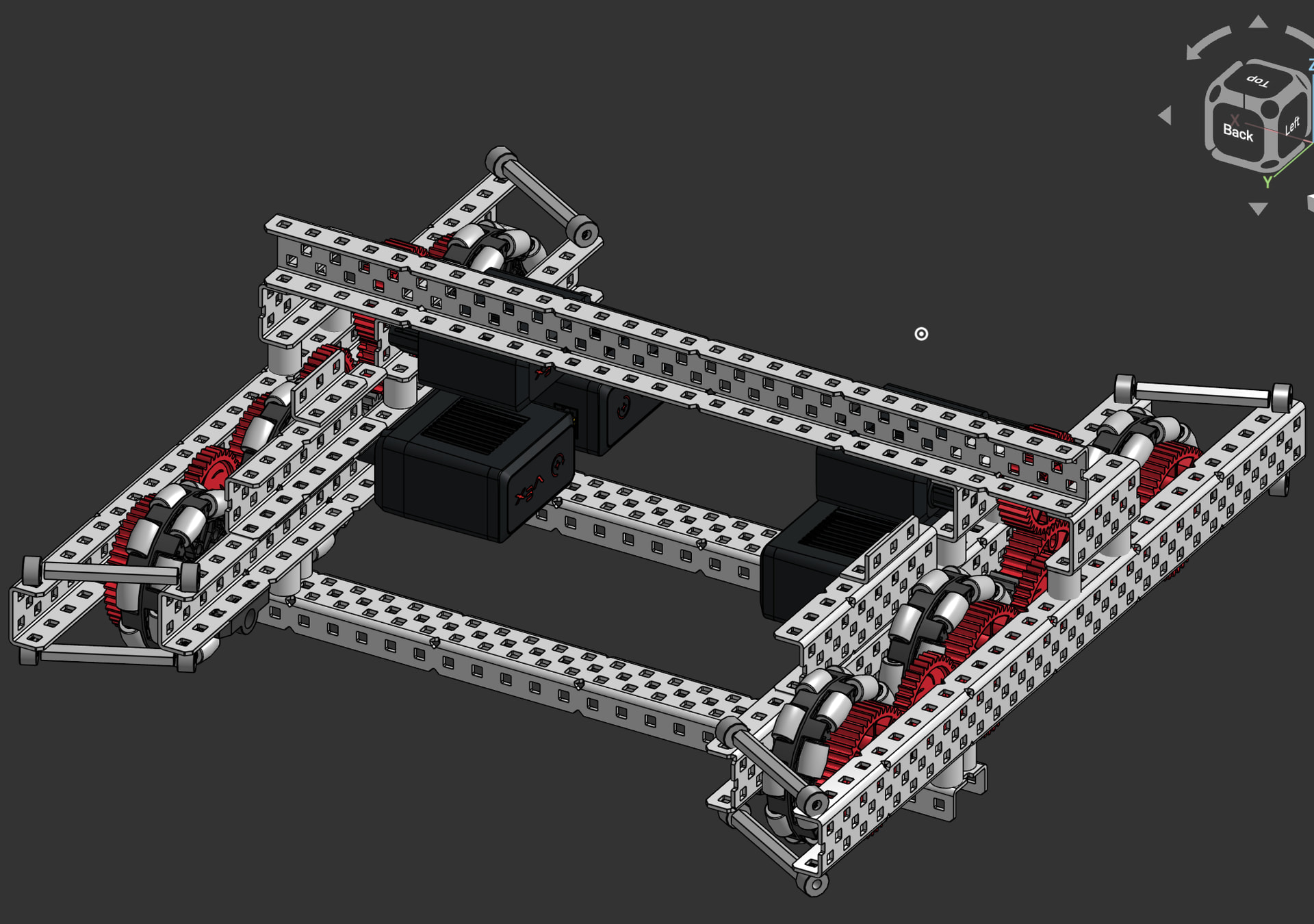
What’s the point of that c-channel on the stacked motors? Can’t you just mount that on the base normally?
I could but that is for cascade

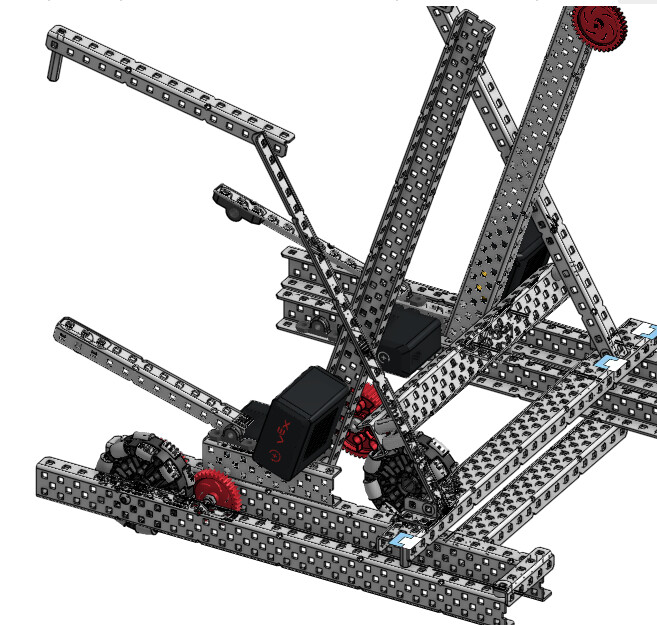
slant cascade ![]() (20charrr)
(20charrr)
It’s the tech trust
20 c
It is tho also it looks hella cool
Why not build it BOTH ways. Then test it, capture data, and decide from there. Also, this sounds like a great notebook entry and forum post.
I’d measure the time to do 10 cycles. This will smooth/average out trying to time a single cycle. I’d also pay particular attention to motor temps. The smaller motors have a different volume to surface area ratio… and I suspect they will run cooler for the same load as a single 11w motor.
To be clear, you need to run enough cycles (continuously for 1-2 minutes) until the temps start moving. I’d also see how long they take to cool down.
I like the suggestion of testing both setups instead of relying only on the specs. On paper, the 11W motor looks like the better choice, but sometimes the way a mechanism is built changes what actually works best.
I’d probably compare things like cycle time, motor temperature after repeated runs, and whether there’s any noticeable shaft twist or flex. Even if the 11W wins overall, having a motor on each side could still make sense if it keeps the mechanism more stable.
Real test results are usually more helpful than assumptions.