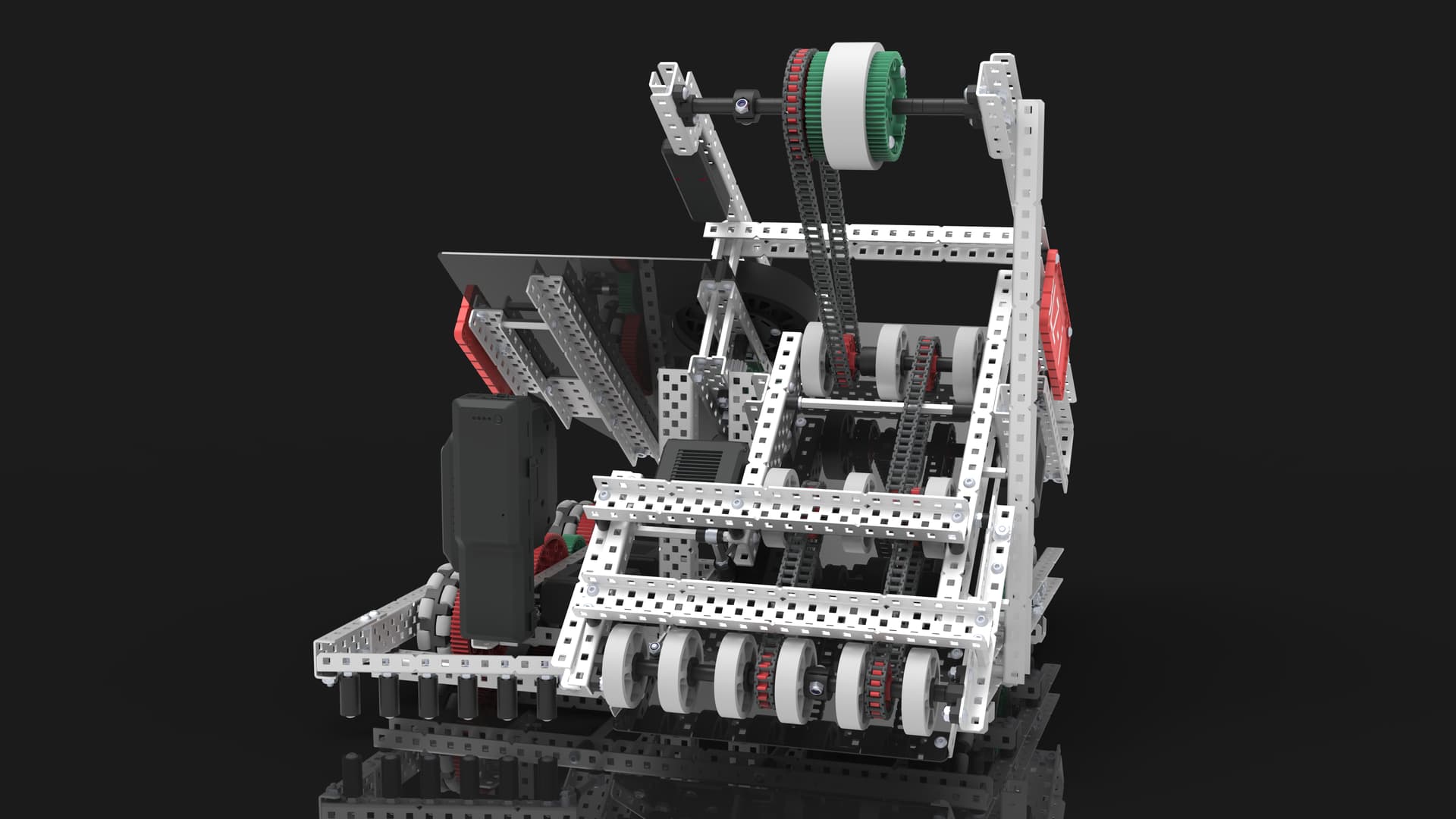
Harvard-Westlake Robotics is proud to announce BLZ-i! This robot is a simple, competitive design for VEX Robotics Competition Spin Up.
The purpose of releasing BLZ-i and the additional resources is for newer VEX teams to have a place to start when designing for this year’s game. We hope that teams will improve the design, add new features, and make it their own.
BLZ-i (Bullseye) is a disc-focused robot that can fill the high goal with discs during a match, remove discs from the opponent’s low goal, and turn the rollers.
Something about seeing multiple identical robots shooting projectiles synchronized is mildly terrifying… more scary is how well made it is. Good work in keeping it simple, yet effective!
We started with a high angled intake, but lifting the discs off the ground was difficult. We found that the lower the angle, the easier it would be for the discs to come off the ground.
What exactly is the curved polycarbonate on the flywheel assembly made of? It appears to be a rubber strip and a polycarbonate strip, but I can’t exactly tell.
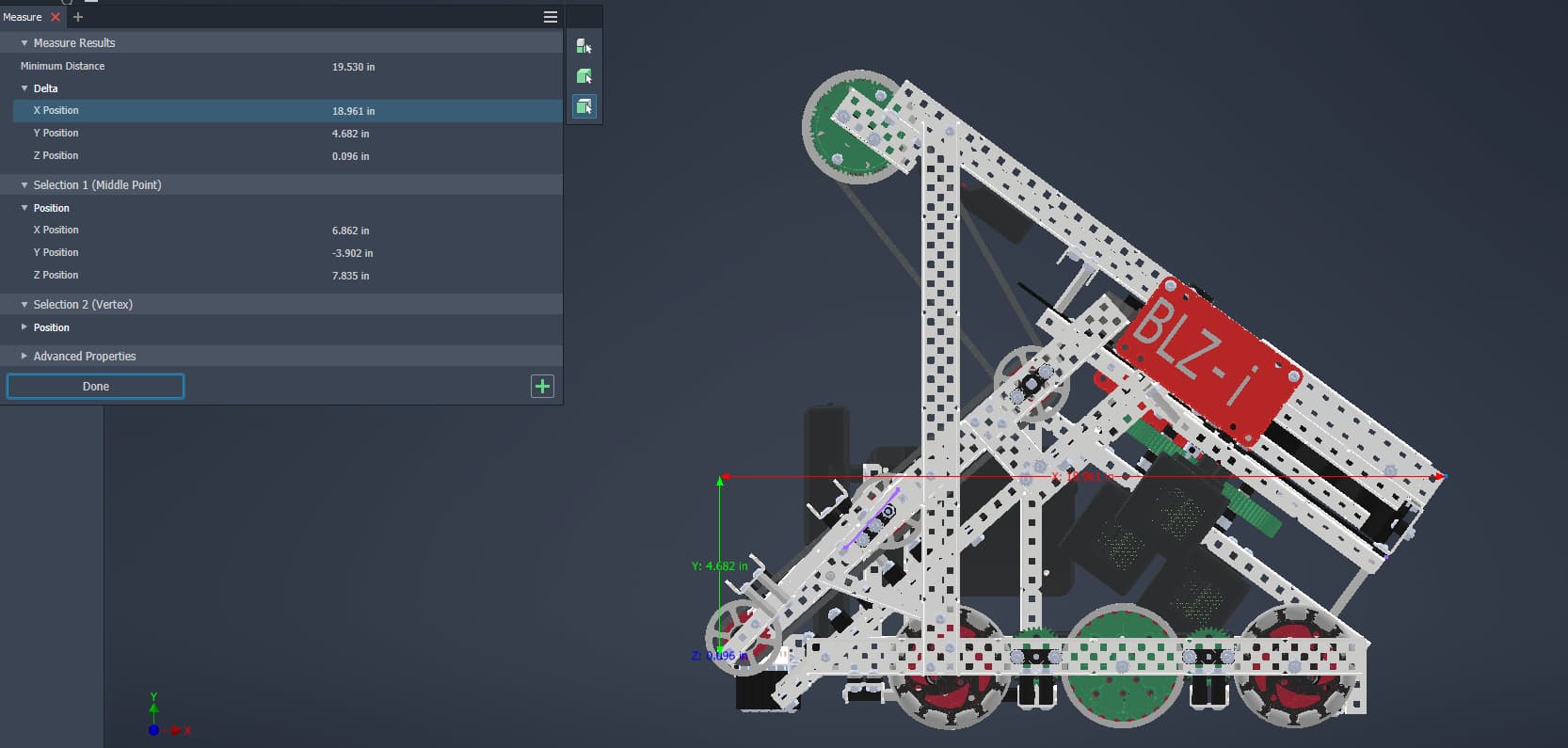
I believe BLZ-i and MARC will both be meta bots for the whole year if an endgame mechanism is attached similar to the ring intake in the DOGO. One concern I have is that the angled shooter seems to protrude out of the 18x18x18 limit, is that so or am I just going crazy? I love the work you guys put in to help inspire veterans and rookies of VRC through the engineering design process. I wish you kids the best in all future endeavors.
Just use counter rollers. We will be revealing one where we use what is effectively a spinning grippy shaft to intake disks into a vertical disk loading path.
I am not from their team, but I can say that it provides the following:
Less compression necessary to get the flywheel to speed up the disc until they are no longer slipping. Compression takes work and loses kinetic energy. However linear launchers only allow for a very brief duration of contact, so you need extra compression to allow friction to get the disc up to the flywheel’s speed.
Greater Impulse → greater exit velocity. By allowing a longer time, you actually get a chance for the motor to add additional velocity into the system.
However there is an added complexity of required precision.
Yes, however I am only pointing it out because it wasn’t mentioned. Also, none of the creators have said the CAD is wrong. Many, many teams are going to build this robot, and expect to have a competition legal robot. This robot is supposed to be competitive, I would assume it would be able to compete, no? Should there not be a disclaimer saying, hey, this robot you are about to build is like 2 inches over the size limit, get ready to do some MAJOR modifications. I love the work that this team has put in the past two years, and the instructions are extremely easy to follow, a great resource, and such a great addition. It just needs to be made clear that this competitive robot can’t compete.