Recently, I’ve done some thinking about my robot, and I want to make a pneumatic linear lift, similar to the forks on the moby-bot.
I’ve seen a lot of teams doing that kind of lift, and I want to implement that design.
But, my question is, how?
I’ve looked through the forums and I’ve also tried to search on youtube. I’ve looked at robot reveals, but I just couldn’t make it out.
Does anyone know how to make a pneumatic linear lift? If so, it would be much appreciated if you could link a guide to it, kind of like the one for 4-bars.
just as a little disclaimer, pneumatic linear lifts are not very good because they only have a limited amount of activations, they don’t extend very far than normal lifts, and the more they are used the less force they can exert.
if you wanted to make one though, i would start with using the linear motion kit
i would do a motor powered one, if it needs to be perfectly linear, i would suggest a cascade lift , if it doesn’t need to be perfectly linear, i would suggest some sort of bar lift (we use a four bar). pneumatics are best if used for a claw
Well, that would make it harder to score rings on, as I would have to install a tilting contraption, as well as make room for the conveyor between 2 four bars.
you probably don’t want a linear lift. If all you want to do is carry a goal inside your robot, a 4 bar, forklift, or some form of tilting clamp are all going to be superior than using any form of perfectly linear lift, and are easily doable with pneumatics.
the hardest part is getting the geometry on the cylinders to do what you want them to do, with a cylinder you have the ability to push or pull 2 points together or apart. On any sort of linkage you use, the goal is to find 2 points that when pushed or pulled the distance of the cylinder stroke, it performs the desired range of motion.
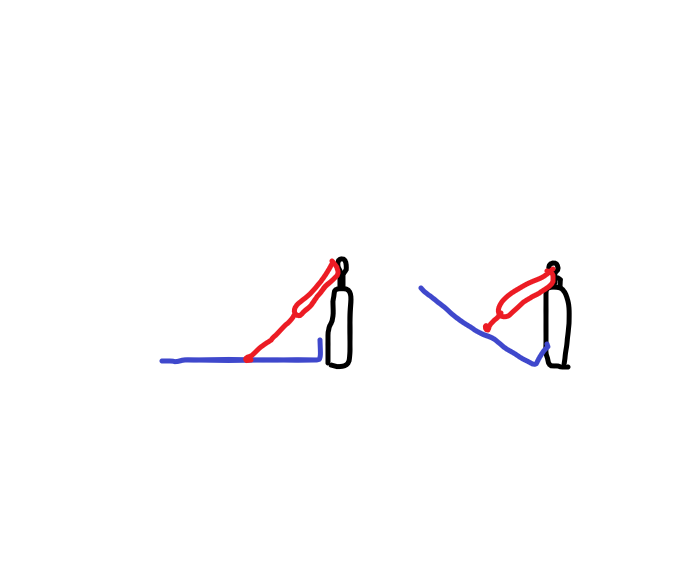
A forklift is probably the easiest option, as you can simply pull up on the sides of the forklift using the pneumatic cylinders to tilt the fork.
Linear lifts are almost always more trouble than the linearity is worth. Especially in this case, when something like a forklift is easy to power with pneumatics.
you could also go to a 4m drive, it would free up two motors, it wont be as fast or as powerful, but 6m is a bit of overkill IMO, and we have done just fine with a 4m 6 wheel drive
6m isn’t really overkill this year. This game has involved some of the most demanding drive power and speed compared to any other, I would say 6m is well worth the extra 2 motors, especially with the ability to use pneumatics.
Thank you for the breakdown. I see that a linear lift powered by pneumatics isn’t the optimal way to do things.
But, given the current status of my robot, I want to be able to hold 2 goals, stack one of them with the 4-bar, and score rings on the other.
@Qalis for a rear tilting mechanism one way to get a motor for that is using ratchets to power the ring mech from the drivetrain. Might be a tad finicky to setup at first but should work well.
Additionally pneumatics could be used to make a tilt mechanism on a 4 bar but i dont know how to do that
")