How are you planning on climbing in 10 seconds? Did you accidentally miss the vertical expansion limit rule?
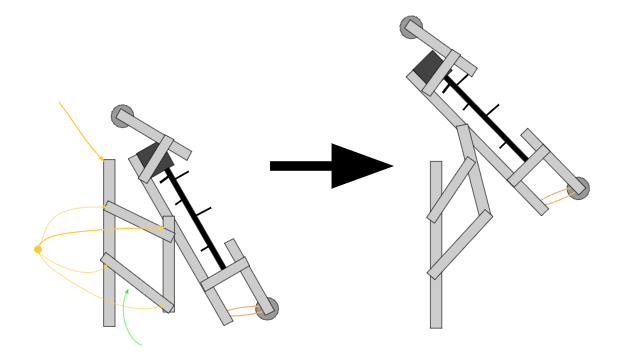
I don’t have all the details worked out yet, but the general idea is a set of 2 rack and pinions , with pneumatics allowing me to latch at each stage and extend the hooks up to the next level. my robot is extremely light, and I will have at least 2 motors left over, so I should be able to climb fairly quickly.
to answer your questions:
I chose kiwi drive mainly just because it looks cool, but there’s also a legitimate advantage. Due to the angled walls, ability to strafe, and high speed, my robot will be very hard to pin down. It’s basically my way of countering defense (since I have 0 pushing power).
The claw will be motorized. I might even try a double-claw with 2 393s instead of one larger motor, not sure yet. An issue our team ran into last year was that we used pneumatics both for our folding wings and our climb latch (the same part served both purposes actually), but sometimes ran out of air before endgame, preventing our climb (a huge issue since we were the only team at our event able to successfully climb). I don’t want to run into that again this year.
What mechanism will be most useful this year? (sorry guys I love polls)
- Claw for MoGo
- Intake for rings
- Arm for rings
- Hang mechanism
- Other (comment below)
0
voters
That sounds like a good 30 seconds to climb… You had a goal of 10
I feel like a low power arm will be pretty good, it wouldn’t need a lot of torque and could place the rings on the stakes with ease. 99% of bots are going to be able to place them on mogos and only 10% of them are going to be able to place them on the stakes without struggling, so stakes are a priority for my team
There are quite a few missing mechanisms here…
Yeah, you’re probably right. I’ll have to see how aggressively I can gear it without stalling out the motors.
Reminder that 393 motors are no longer legal for V5RC. However, you can use 5.5w motors for a similar result.
That’s actually a really good strategy.
Really, the intake and MOGO systems work together. That’s what I would say.
That’s what I was thinking becasue the only climb you can have a passive climb you get 3 points but if you get 2nd or 3rd level you will have to try and take some time to climb and in that time a full moble goal can be cleared from positive to negative losing you a lot of points. I think they should make a protection for the positive/negative goals but then it might not really be as crazy and fun at the end.
We’re thinking about a 6 motor, 360rpm drivetrain with 3 sets of omni wheels and 1 set of traction wheels close to the middle just so we don’t get bullied as hard
we’re taking a lot of inspiration from the 1 week robot that’s been being shared around a lot recently in terms of intake and mobile goal holder, but we’re strongly considering putting the entire ramp on a bar lift or something similar to lift it high enough to score on stationary goals.
Tl;Dr
Drivetrain: 6 blue motors, 360 rpm, 6 Omni wheels, 2 traction wheels
Intake / Scoring mech: Same as one week bot, but on a bar lift (see pic)
Sc7 says for a robot to be considered elevated to a tier it cannot be contacting a mobile goal.
R6 violation
(20 characters)
TBH i don’t think it would be dangerous tho, especially when most robot will choose to not climb on the same face of the structure.
I am taking about damage to the mobile goal.
I actually had a basically identical idea, I wanted to use this this differential to do it and attach a passive hang to it that you can use when the lift is up
I am doing 2 separate chains that take it back to the front of the bot to make the bot more driveable
It may or may not cause damage. It would require extensive testing, but could be fine. This would also depend on the height of the drop. For example, a T1 climb could drop a MOGO with no damage, but a T3 drop would cause more damage.