Short answer: There is no single voltage being used to generate this graph due to V5 Smart Motor firmware throttling motor performance to ensure it remains under a 2.5 A current limit.
Long answer: From above ~50 RPM until max RPM, the motor is running at a constant maximum voltage (that is software limited below nominal battery voltage to ensure that even near dead batteries can supply a consistent voltage to the motor).
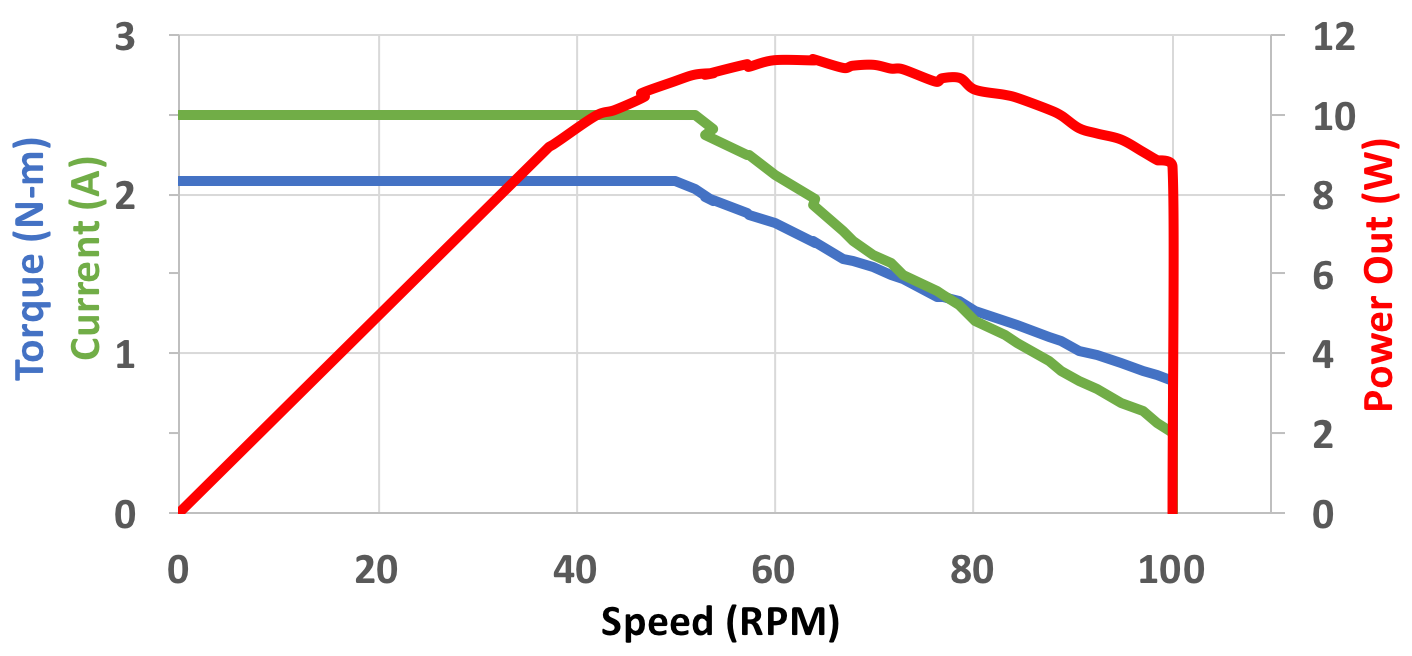
Normally, as you stall a motor further (below ~50 RPM), the current draw and torque will continue to increase. Torque is directly proportional to electrical current draw in DC brushed motors, and power at any given point on the motor curve is torque x rotational speed. Thus, on an unclipped motor, you’d expect straight lines for torque and current curves, and a parabola for power, like on this CIM Motor graph.
What this means in reality, is that if you command a V5 Smart Motor to spin at 20 RPM, the actual voltage driving the motor can vary quite a lot depending on how much the motor is loaded.
If you let the motor free spin, it won’t take a lot of voltage to make the motor spin at 20 RPM.
But if you start loading the motor further, the firmware on the V5 Smart Motor will start sending a progressively higher voltage to the motor. With higher voltages, the motor can thus draw higher current, thus enabling it to output more torque, which finally enables it to try to overcome this higher load.
The V5 Smart Motor will do this automagically behind the scenes until it hits the 2.5 A current limit, at which point the V5 Smart Motor firmware will cap performance (at least until you hit the temperature cutoff, at which point it will lower output even further to prevent damage).
These firmware limits are the reason why the lines on the motor performance chart are perfectly linear below ~ 50 RPM.
Lastly, between ~50 RPM and free speed, the motor can throttle voltage below the maximum voltage based upon motor load, but there’s a lot less headway here. At these levels, the motor can only vary voltage until the motor current draw reaches the point on the current draw curve. So at a commanded speed of ~80 RPM, the V5 Smart Motor can draw anywhere between ~0.1 A and ~1.25 A.
Lastly, this graph was the result of us testing an assortment of V5 Smart Motors on our dynometer and averaging the results, hence the reason why the graphics are slightly noisy and not perfectly straight / parabolic above ~50 RPM.