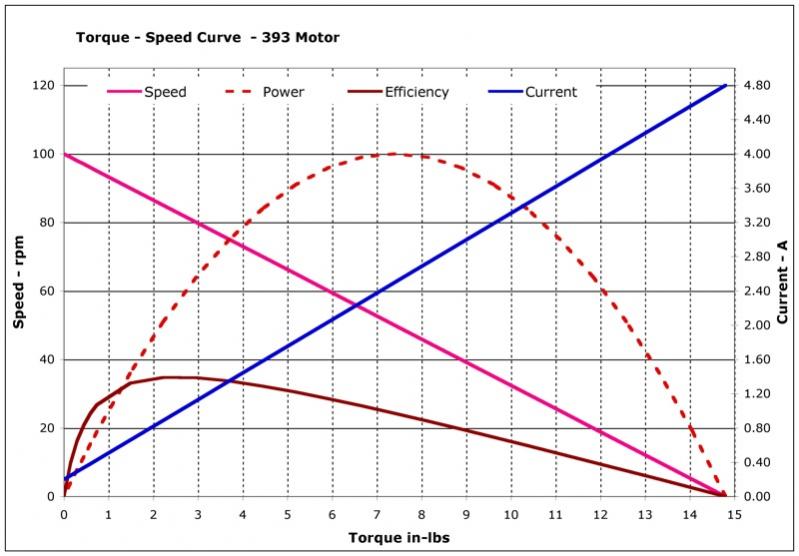
Back in May I had posted the theoretical speed-torque curves for the 393 and 269 motors. Other forum members did experiments and IFI confirmed that the curves matched their test data, Life was good.
In another thread I had used the theoretical data along with other measurement to estimate motor current based on commanded and measured speeds. IFI posted that they were also doing tests and would release data that would help us all. The data was released in June and for the 269 motor pretty much matched the theoretical results. The data for the 393, however, was quite different and this, along with a couple of the conclusions drawn from the data, has been bugging me since then. At the end of June IFI changed the posted spec for the 393 motor on both the product page and wiki, the new spec has the maximum stall current 33% higher than previously shown along with a modest increase in torque and higher no load current.
So what is an engineer to do? Well the only thing I know how which is to buy myself some motors and do my own tests.
Issue 1, max stall current has increased from 3.6A to 4.8A
This is pretty easy to test despite suggestions to the contrary.
First off, measure the resistance of the motor windings, I measured two motors and found both are nominally 1.5 ohms. So for 7.2V across the motor when it is stalled and back emf not involved, ohms law gives us a current of 7.2/1.5 = 4.8A, what a surprise.
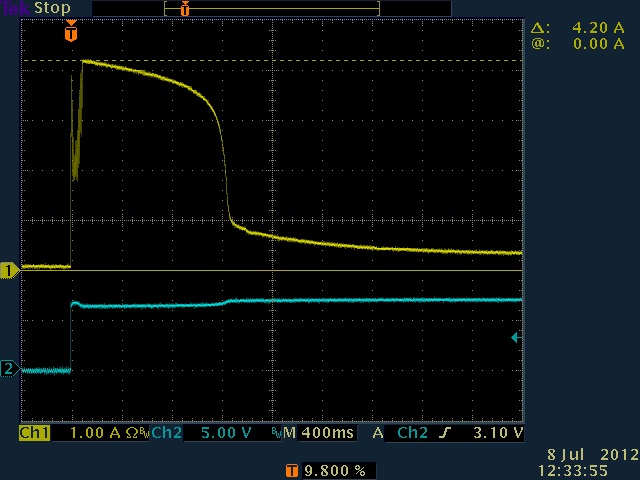
Secondly, setup the scope to measure current and hit the motor with a 7.2V impulse then look at the resulting current waveform. As the motor is initially stationary there will be no back emf and the current for the first few mS will esentially be the stall current. The motor does present an inductance as well as resistance so the current will also build up to the maximum value, however, the time constant for this is smaller than the time it takes for the motor to start moving. I measure a 393 hooked to a MC29 connected to port 9 on my cortex. Power comes from a bench supply i drag home from work able to supply regulated 7.2V at up to 20A. Here is the scope waveform.
The yellow trace shows current, the blue one the input voltage drive. I measure 4.5A in the first 2 or 3mS before the current starts to drop as the motor turns. This is not quite the theoretical 4.8A but close enough bearing in mind that as well as the motor windings there are two PTS devices and a couple of less than perfect connections in the circuit all adding some resistance.
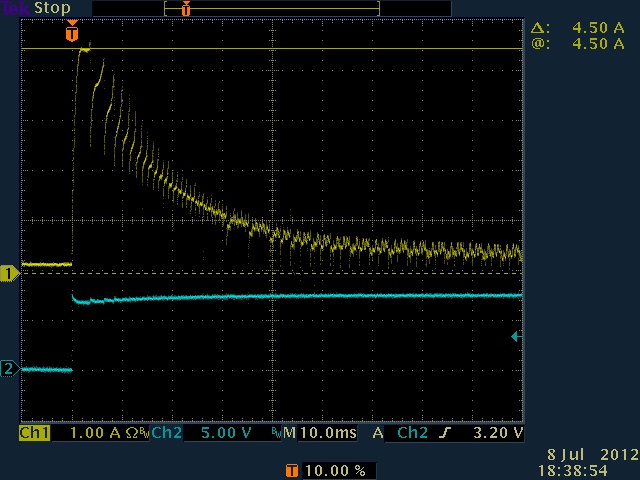
Here is the same thing with an expanded timebase (captured at a later time so test conditions changed slightly).
The current tales about 1mS to build to the maximum value, close to the 4.8A theoretical number.
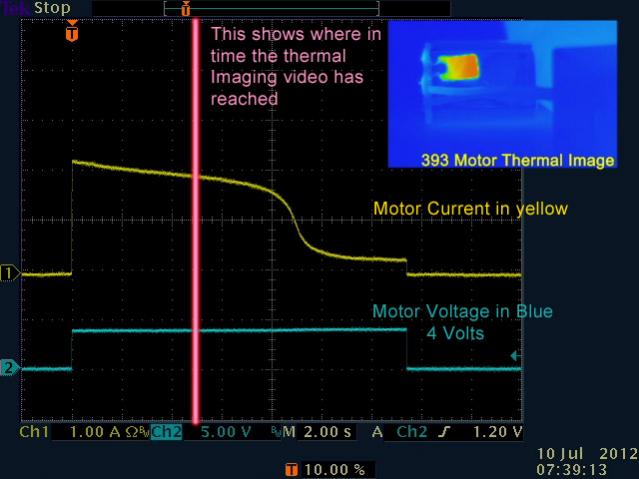
One final test, stall the motor at maximum power, measure the current.
This was actually a different motor so slightly different result, approximately the same current, PTC trips in 1.2 seconds which is when the current drops from the 4.2A maximum to about 1A and then slowly to 400mA. Slightly strange behavior here but that’s to be looked at on another day.
So the first conclusion based on these measurements is that indeed the old 3.6A spec was a little optimistic and 4.8A a more realistic number.
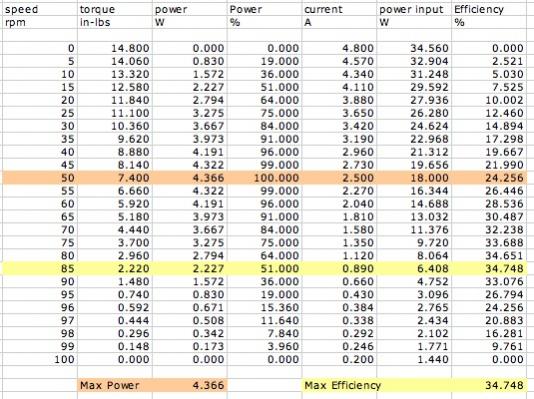
Issue 2, Paul states that, based on his interns measurements, the maximum recommended input voltage is 4V, corresponding to a motor drive command value of about 64, for a stalled motor not to trip the PTC quickly. The data shows that at this voltage 2.82A will be flowing through the motor.
In this condition the PTC will not trip for 3 minutes.
I say, no way!
The PTC in the 393 has a trip current of 1.8A (and a maximum time to trip of 5.9 seconds at 9A) but I’ve found that the datasheet for PTC devices always seems to be optimistic.
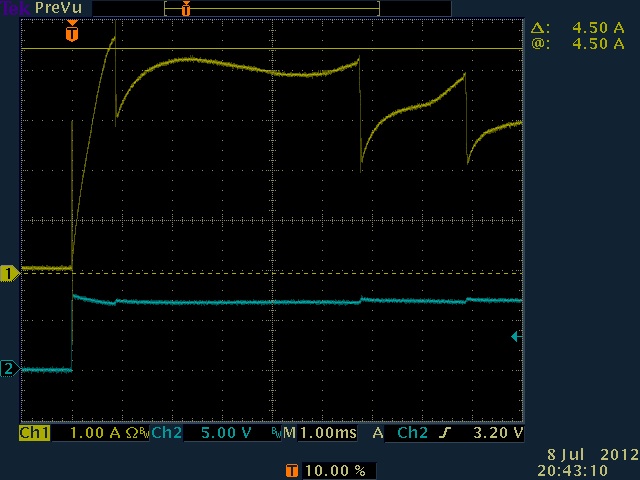
So I send a command to the motor with a value of 64, stall it, and capture the current on the scope showing when the PTC trips.
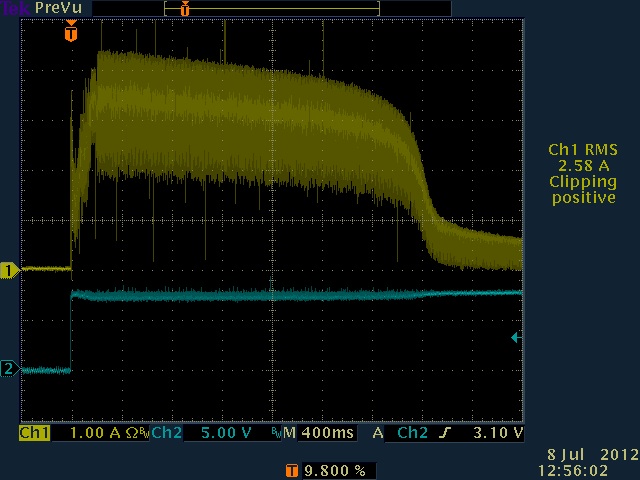
Again the yellow trace shows current, it swings between 4.5A and 2A as the PWM voltage turns on and off. The scope measures 2.58A RMS current but it is being tricked as the current falls, its probably nearer to 3A. The PTC trips in a little under 3 seconds, so maybe the “+3” in the IFI results means 3 seconds rather than 3 minutes, I can believe that.
Conclusion, with a command value of 64, a stalled 393 motor will trip the PTC in around 3 seconds.
Issue 3, the no load current is now specified as 370mA.
It used to be 150mA, so has it really changed?
Under a no load condition the current waveform is quite complex and looks like this.
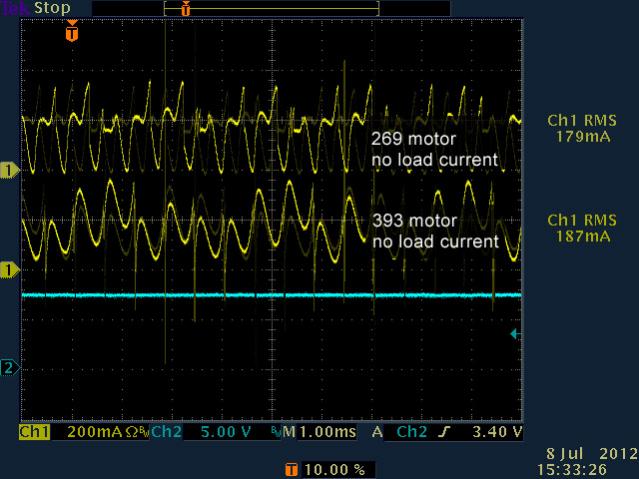
I show the no load current for both the 269 and 393 motors in this trace, they have different characteristics but on the whole are similar in amplitude and peak at less than 400mA. The scope measures RMS current for the 393 as 187mA (and 205mA in the reverse direction not shown here) so I’m going to say a more reasonable value is 200mA. I only tested two motors for this so perhaps there are some outside this range, anyway, for the revised graphs I’m going with the 200mA value.
**Issue 4, torque is increased from 13.5 in-lbs to 14.76 in-lbs.
**
I still don’t have a way of measuring this that I’m comfortable with so I’m passing on this one and just taking IFIs word for it.
I will post the revised torque-speed graphs in the next post and than revisit some of the old comparisons with the 269 motor in a subsequent one.
.