New to VEX, need help - I heard a lot of buzzwords and other things floating around these past few weeks and I have no idea what they are.
First off what is odometry and how is it used in VEX? Is it just used for auton? How is it programmed? Is there anything you have to change in your robot chassis to accommodate for that? What are odometry pods?
I’ve also seen some robots with polycarbonate surrounding/wrapping their drivetrain channels. What’s the point of that? Does it help with stability, defense, overcoming obstacles, aesthetics, etc.? How do I make my own? What’s the difference between 1/16 and 1/32 poly sheets? Which one do people use more and for what? I’m currently cadding a drivetrain in Onshape and I really wanna use poly but I don’t know how to cad it or build it in real life. I’ve also seen people use sleds at the ends of their drivetrain. Are these made of poly too? Should they be used this year in High Stakes?
Odometry is an advanced position and motion tracker. I wouldn’t recommend it on your first bot. It is a good thing to research and learn if you know the necessary trig and calc.
There are a couple of uses for these “skirts” but they are mainly for decoration. They can also help with mechanical advantage in a push fight. (Think about how football linemen start low to try to push their opponents up while pushing them back)
Fairly self-explanatory. 1/32 will bend more nicely but 1/16 is much stronger.
I don’t see any use for them this year. But yes, they were made of polycarb or delrin.
Odometry is a positioning system used to track where the robot is during auton and allow it to move to points on the field. You need to do some trig to code it yourself, or you could use a template that supports odometry (I recommend JAR for beginners) for a “plug-and-play” type deal. This document by Purdue SIGBots is a beneficial resource if you want to understand the math behind odom.
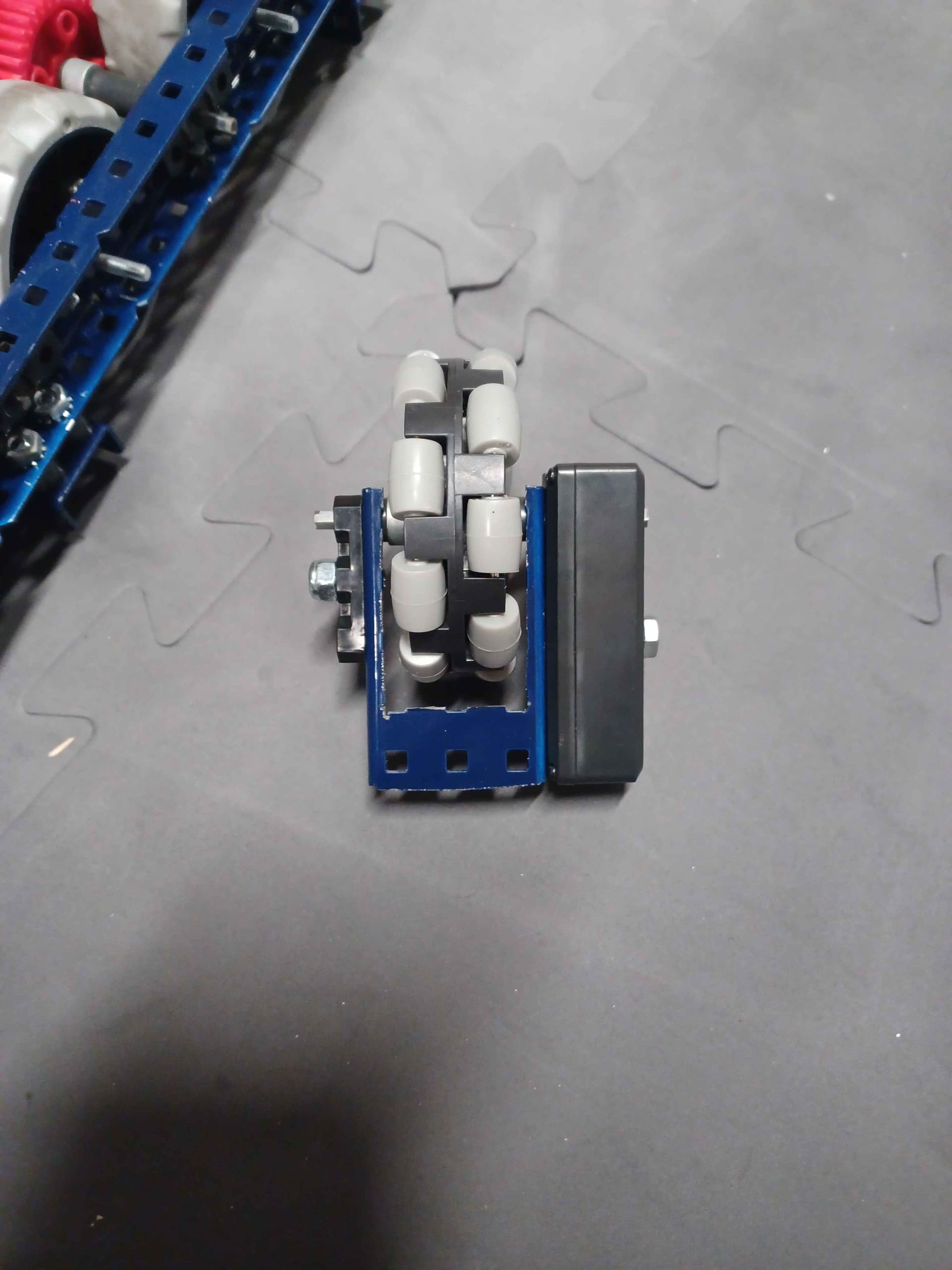
Odom pods are basically free-spinning wheels with a tracker on them used to track the position of the robot for odometry. Here is a picture of one of our pods
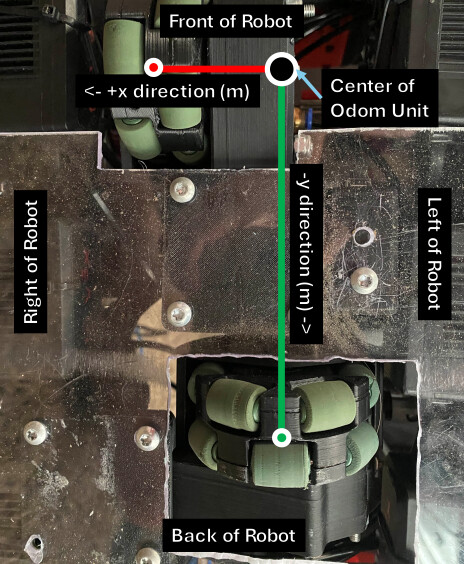
Generally, you have one vertical and one horizontal pod to help track all the possible movements the robot can make. You can use odom without trackers, but it will be less consistent. For mounting, you want to band them down to maintain constant traction with the ground. You will need some space inside your chassis, but it’s not a lot.
For the polycarb plates on the sides of the bots, it is probably a combination of the reasons you listed. They probably help teams not get stuck on rings as much, help prevent direct damage to the drivetrain c-channel, and also just look nice.
It’s hard to say how to make your own without knowing what your bot looks like, but I would say it is much easier if you have a CAD since you can model a sheet on the bot in the CAD and then cut it out with a CNC machine, laser cutter, etc. Without CAD, you probably want to get some measurements and just cut out the polycarb into the shape you want with a pair of heavy-duty scissors or some other tool that will cut the plastic nicely.
I can’t speak much about the difference between 1/16 and 1/32 sheets as we use only 1/16, but it works well for us, and we use a lot of plastic on our bot. Generally, 1/16 will be stronger than 1/32 due to the increased thickness, but that’s about all I can say about that. Just try it and see what works best for you.
Sleds on the end of the drivetrain were really popular for Over Under because you needed to cross the barrier. Since there is no barrier in this game, I personally don’t see a use for them unless I am misunderstanding what you are describing.
Hopefully, I answered most of your questions. Good luck this season!
Plastic may be mechanically altered by cutting, drilling, bending, etc. It cannot be chemically treated, melted, or cast. Heating polycarbonate to aid in bending is acceptable.
What’s the difference between 1/16 and 1/32 poly sheets?
That’s the thickness of the sheet.
Which one do people use more and for what?
I’m not sure. Let’s do a poll!
Lexan/Polycarbonate
Delrin/Acetal Monopolymer
Acetron GP/Acetal Copolymer
Acetal/POM
Nylon
Polypropylene
Other (FEP, ABS, PEEK, PET, HDPE, LDPE)
0voters
Are the sleds made of poly too?
My team didn’t use poly sleds, but many did.
Should they be used this year in High Stakes?
Sleds were from last year to go to the other side of the field on Over Under. You probably won’t see them this year.
Odometry is a method of tracking a robots position over time using data from sensors. It’s mainly used in vex to create more accurate autons.
Yes, but there are rare exceptions where it can be used in driver control. One such example was when I used odometry combined with a vision sensor to create a auto aiming turret during spin up.
It is programmed by creating a thread/task that runs in the background. This thread/task monitors wheel encoders, measuring local change in x and y. Then, a transformation is applied using the robot angle to rotate the local delta x and y to global x and y. This is then added to the last known position.
There aren’t any change you need to have but if you want more accuracy you can use odometry pods. If not using odometry pods, encoders from the drivetrain motors can be used.
Odometry pods are unpowered wheels placed on hinge with a sensor (either a rotation sensor or optical shaft encoder) to measure the rotation of the wheel. The pod is on a hinge to ensure constant ground contact and may be rubber banded down to reduce the chance of wheel slip. This is better than using a motorized wheel as there is a chance the motorized wheel will slip when accelerating.
Not going to answer any of the remaining questions because thats outside my realm of expertise but one thing I can say is that sleds should not be used this year. They were in use last year to get over the barrier and using them increases your chances of getting stuck on a ring greatly.
Feel free to ask any questions you have related to odometry!
Odometry in the rough sense is some method to estimate the position of the robot in the world.
With wheel odometry, the robot has the capability to know where it is based upon how much the “odometry pods” (or un-powered wheels on a lever that continuously presses against the ground for improved accuracy) measure the movement on a local-space. A lot of this involves linear algebra which traditionally is only covered in college, so don’t be afraid to look at code examples that the community has made to learn odometry yourself. Odometry is not something that is simply easy to figure out off the bat.
These videos do an excellent job explaining odometry, the two types of odometry (linear and arc), and why arc-based odometry is better.
Traditionally, yes. However many teams have developed robots with turrets that continuously aim at the goal during driver control period. For example, in the early days of VRC we had “The Fuse” which was a very memorable robot back in the day:
Yes. You would need to add odom pods. This can be done by 3D printing (if in VEXU), using lexan, or using traditional VEX metal, but you would realistically need to design your drivetrain with the notion that you’ll need to add odometry wheels. If you don’t accomodate space for odometry wheels beforehand, you usually won’t have space after half of the robot is already built.
It usually is different reasons. Some robots use it as a reinforcement, while others use it to “glide through” while under defensive conditions during a match.
Traditionally lexan (polycarbonate is illegal becaus it shatters) is treated as sheetmetal in CAD. This is because most teams CNC route their lexan for clean and precise cuts and to squeeze as much as they can out of the lexan limitations, to get as much of an “edge” (pun-intended) they can take out of such materials.
Teams stick to 0.07" inch thick lexan. Traditionally teams stick to that exact thickness for structural purposes.
The sleds were present to go over the massive bar during over-under season. There’s no longer any bar but rather a flat plane. Ideally, I would omit sleds as they don’t serve an importance this season.
Let’s be very careful with terminology please, especially when we are talking with new people who might not be fully acquainted with the game manual. Lexan is a trade name for polycarbonate, the “Lexan” name is owned by GE Plastics. It is a legal plastic according to R19d in the game manual.
The most common illegal plastic is plexiglass, a trade name for acrylic or polymethylmethacrlate (PMMA). In past years, robotic students used the word plexiglass as a generic name for clear plastic, not realizing it was an illegal plastic. Several years ago the name “plexiglass” was specifically added to the game manual as a clarification.