Each year, there is usually a physics thread to work out the math behind the theoretical “best” version of a design. Many, many people have contributed to the vast amount of information that is available on this site (thanks technik3k), and I was hoping we could do something similar this year. The one robot part that has been intriguing me has been the tilter, as its geometry has varied greatly in various robot designs. What is the optimal way to build the arm such that the tray is given maximum torque when it needs it the most (when the tray is all the way down)? I have a feeling there is some sort of perfect balance between the length of the driven arm (longer means less torque) and how high up you push the tray from (higher means more torque). Any information about this will make the VEX community that much better. Thanks!
The following geometry is close to what you are looking for (drawn not to perfect scale):
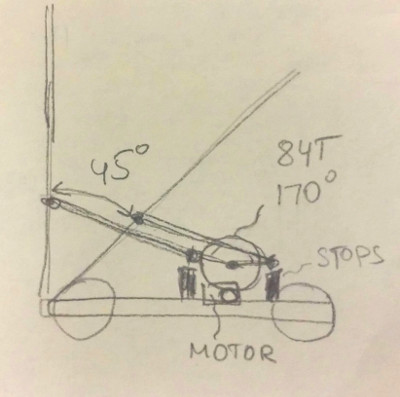
Where for the 45 deg travel of the tilter you have somewhere close to 170 deg travel of the driven gear.
When tilter is raised, this will provide largest torque and small acceleration at the beginning, max velocity half-way, and then will gradually slowdown at the end of travel. Also, it will naturally lock the tilter in the raised position, without the need to keep the motors actively “holding”, which would be great fit for the differential power take off from the drivetrain motors.
I’ve seen a number of reveals having this geometry to some degree, with 1961Z, probably, being the best example (watch 0:52 to 1:05):

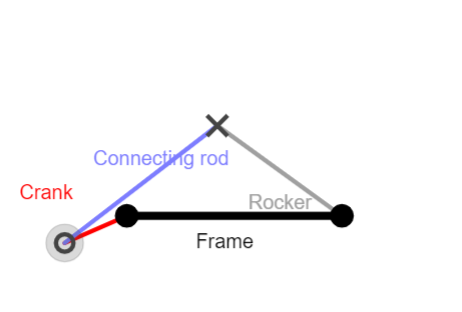
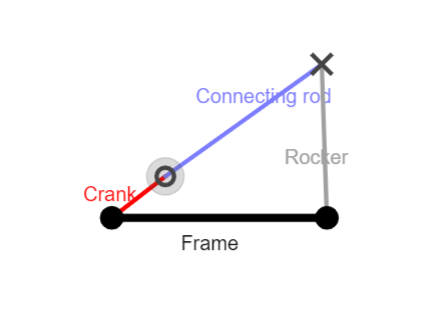
When the connecting rod almost runs into the shaft connecting the crank to the frame, then it is at its optimal torque. Then just make sure the gemoetry is such that like in the final diagram, the rocker is straight up and down when the crank and connecting rod are aligned.
EDIT: This optimizes starting torque and provides a motion profile that both limits the final tilt position (so that you cannot over tilt), and it decelerates the tilter as it reaches its final position (doesn’t fall forward). However if you wanted to really get your stack moving, make sure that your tray stores potential energy (rubber bands) as it tilts down so that it can tilt forwards as quickly as possible.
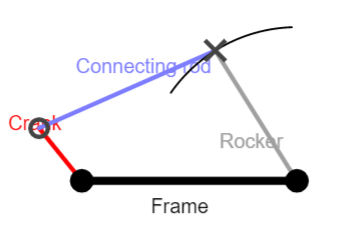
If your max tilt was achieved so that the crank was as it is in the second picture, perpendicular to the connecting rod, it would maximize speed, but with a lower mechanical advantage and a large final velocity. This would be much better for a lighter set up where you needed to minimize lifting time and fling your pile into something with reckless abandon.
Source https://www.geogebra.org/m/zZ5Bt9hX
@AperatureLabs, thanks for the insight. From most examples I’ve seen, the crank (red) is usually short. Is this to keep torque high?
Yes, if you had a longer crank you would have much less torque.
If you have minimal friction on the tray pivot point, the torque needed to push it isn’t too high. That being said, it also depends on your max cube capacity. Ideally you want more torque than just the right amount because it gives you more freedom to add on to your designs. Anyways, a 21:1 gearbox reduction for a 200 rpm motor will suffice. I calculated the torque produced in newton meters to be about 793 newton meters (21:1 gear reduction * 18:1 gear cartridge * 2.1 stall torque).
This effectively gives you a decent amount of torque to work in which the relative length of the tilter lever is arbitrary, though the longer the better since a longer arm would push higher up against the backing of the first stage of the tray which = a greater overall torque. I found that trays don’t require much torque to tilt when they are empty, I can’t say for any other case but it depends on the resting angle for a loaded tray.
I wouldn’t go much lower than 45 degrees as it is a nice balance between the 2 axis affecting the tray. The force of friction and and gravity aren’t very resistive to the intake motors depending on the build quality at about 45 degree resting angle. Hopefully you get the idea.
@mvas that makes sense, so it’s probably best to secure the arm as high up on the tray (while keeping the crank short but the arm long) without reducing the structural integrity of said arm (6in or the longest standoff should suffice). However, there’s is most likely some tweaking involved with the gearbox position and crank length to get the velocity the highest at the right time while keeping torque high enough. I’ve seen most teams use a 14-15:1 driven:drive ratio, as it has enough torque to tilt 8-10 cubes. Thanks for all of the extremely useful information so far!
I’ve been able to tilt 10* cubes with a 1:7 100rpm gearbox.
Yeah, that sounds about right, 14 times the torque of a standard 200rpm motor.
Well kinda. If the crank is what you’re referring to as the c-channel directly connected to the final driven gear in the gear box, then you want it to be relatively short. Namely because the output torque from the gearbox isn’t lost regardless of how far up or how low on the backing of the tray you go because that loss in torque on the crank is gained but the torque applied to the backing of the tray.
It would be easier to explain visually but if you understand how torque works, it should make complete sense. 21:1 is definitely overkill, but I found it fit nicely on my robot and works pretty well. The motor doesn’t over heat and the friction in the system allows the tray to rest naturally at any angle I want which is good for passing inspection or saving battery.
1:21 @ 200rpm or 100rpm?
It would be 200 rpm. The difference in torque from a 7:1 and 21:1 on 100 rpm and 200 rpm respectively is about 200 nm.
Is that a significant amount?
Well to give you an analogy, 100 newtons is about the same force is a 10 kilogram weight resting on your hand. 700 newton meters would be about the same force of a 70 kilogram weight resting on your hand however it’s applied over a rotational axis, and the force is reduced in proportion to how far away it is exerting said force.
So for a lever like the one on a tilter, the force at the end of the lever that pushes the tray forward wouldn’t be exactly 700 nm, it would be less. However since the tray backing also acts as a lever since it is on a pivot, that force would be recovered if not multiplied further depending on your tray set up.
So in short, the difference depends on your tray set up. There are ways to increase the torque output of your gearbox outside of the gearbox like the way I described above. The difference in this case wouldn’t be significantly impactful because the tray doesn’t offer much resistive force, even when it is loaded. But, I like the idea of having more torque on a tray for the fact that you will encounter external forces such as friction, being blocked by a robot or cube which can prevent a deposit, increasing cube capacity, etc.
There’s no real reason not to increase the output torque unless your gearbox is already large enough within your robot (the tilter doesn’t need to be fast). For me, my gearbox was about 6x14 holes. It sits pretty perfectly in the middle of my robot’s chassis.
Thanks, op needed this thread.
Also, does anyone have tips for intake compression or even intakes in general for the tray design? My robot is having a lot of trouble with cubes after 7, we did get it to pick up 10 before but now we’re stuck at about 7-8 before the intake just starts slipping, not necessarily burning out. Sometimes it does slip on one side and not move on the other.
The tray’s angle is roughly 35 degrees and the intake is like mega angled in for compression, doesn’t pivot outwards.
I haven’t done this but have you considered lining the tray with plastic?
My team has placed Lexan on the tray to reduce friction although the screws do cause a bit of bumps.
Honestly friction / bumps don’t matter in my opinion. So long as the tray walls have sufficient height and the tray is wide enough the cubes will go up with ease.
your problem sounds like a lack of traction, not torque. try moving the sprockets closer, or using larger or more flaps.
as @Xenon27 has said, usually traction is an issue for tray bots until you get up to about 12-13 cubes. If your rollers deploy, i suggest allowing the rollers to get closer together to get more compression.