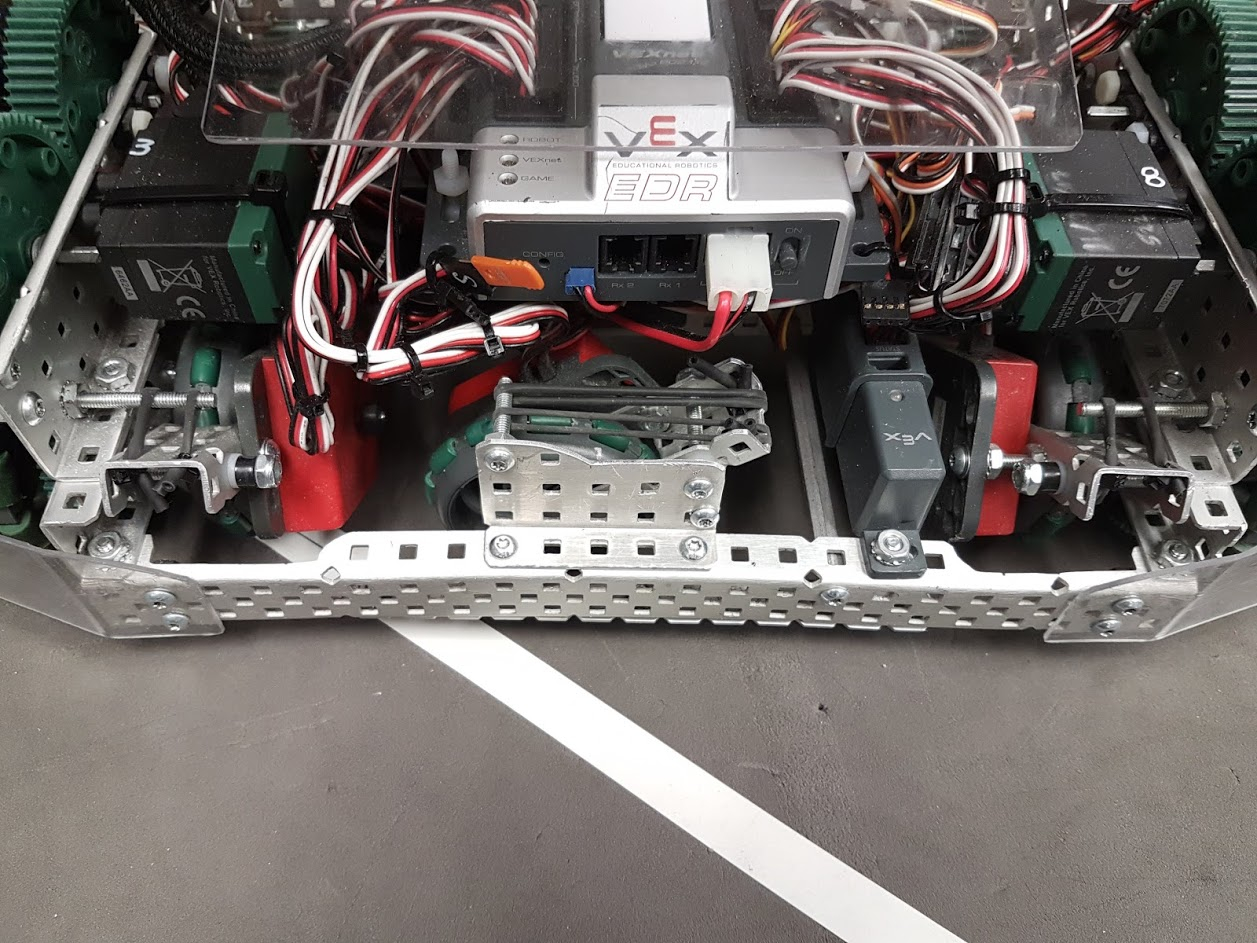
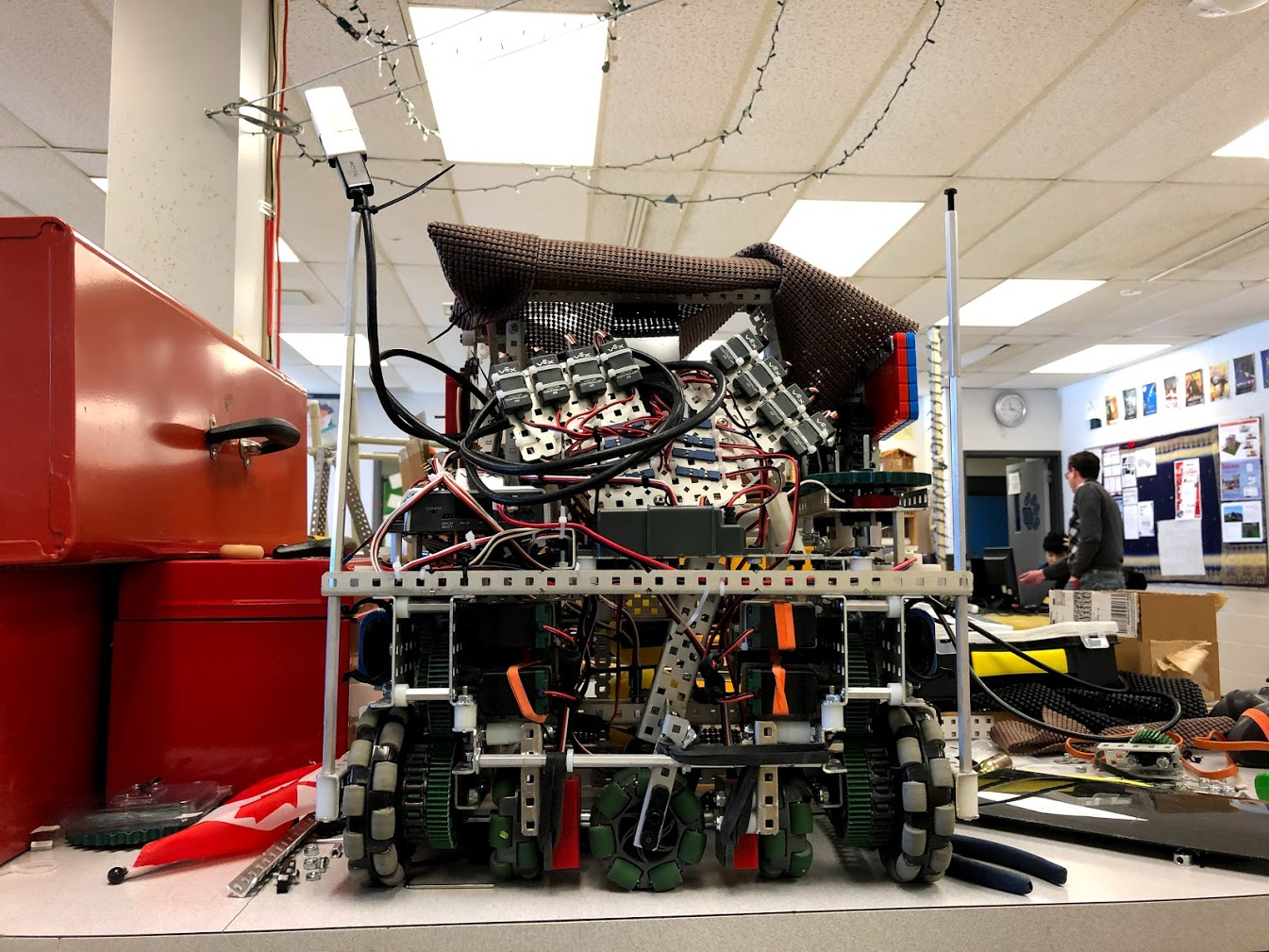
Here’s a picture of the back of our 2018 worlds bot. You can see the mounting system that we used for all three tracking wheels.
I tried to upload the pictures from my phone but they looked squished. I’ll send it from my computer in a bit.
Alright. Because there are a lot of pictures I’ll send a google drive link instead of directly linking them here. There are 2 folders inside. The first has pictures from when I was first building the chassis and the second has pictures from a revision to the tracking wheels that is taking place right now. I realize it’s a bit difficult to really tell what’s going on from the pictures in the second folder, but please forgive me. I took them on the way out the door yesterday and didn’t have time to get the best shots. If you still need help I can get more on Monday, and maybe even some video. Hope this helps!
https://drive.google.com/drive/folders/1SQBsDDzNqkZaBgCCSQnTQ-OeO-SO8jiR?usp=sharing
@nickmertin, @P_Mania WOW! You posted great reference pictures guys!
I’ve renamed the topic to “Position Tracking Wheels Mechanism” so that it is easier for everyone to find it through the forum search function.
What type of wheels are you using for tracking wheels?
Those are the old 2.75" omni’s. If you don’t have any of those, the new ones are just a bit thicker but will fit nicely in a 3 wide c-channel the same way those do in a 2 wide.
Thanks!
<20 Characters>
We used the new 2.75 inch omnis and cut them in half with a hacksaw. That lets them fit in 2 wide c-channels like the old ones did.
Thanks a lot for the pictures. They will help a lot when we start designing our bot. @P_Mania and @nickmertin and @technik3k
No problem! I’m glad I could help. :D
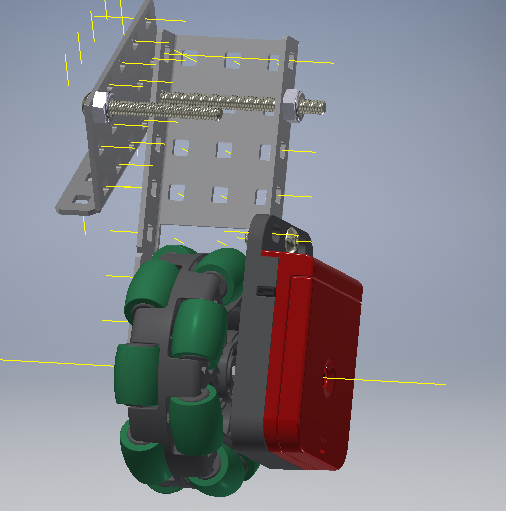
@P_Mania Would the design you sent work if only one side of the drive goes off the ground? and is the angle piece that connects bar and the wheel, is that custom made or a vex part?
So the reason we have 3 tracking wheels is so we can run an odometry algorithm that keeps track of our absolute coordinates on the field. Team 5225A has a fantastic document explaining how this works, but if you’d rather not dive down the rabbit hole, relative movements will work just fine and they only need 2 tracking wheels. (Or you could just use one if you only want to track linear movement, but I think the ability to accurately track rotation is well worth the extra wheel.)
As for the part we used, I assume you mean the 90° angle gusset. These are a stock vex product, and they come in handy for a lot more than just this. (I may or may not have used 20 of them on the chassis structure alone, because I may or may not be a lunatic)
Don’t feel like you need to stick to my design though. There really is no “right way” to do it. Whatever works best for your purposes is what you should build. :)
ok cool got it thankyou
@P_Mania How did you manage to cut the wheels in half and when you did was the other side usable? Because when i told my teachers he doubted the idea so i just want some assurance that the wheels actually work.
thanks
Please try not to cut the fat wheels in half (the new 2.75" omnis). They will work, but won’t work as good as they could. It’s entirely possible to fit them in regularly. I’ve attached a photo of how we did them here:
You can clearly see that we didn’t cut the wheels, and still managed to make them all fit. Cantilevering the wheels did not hurt them too much (but be careful), and if i were to do it again I would have created something on the other side of the encoder to make sure that it wasn’t canti’d.
This is probably a stupid question but wdym Cantilevering @ranOOm
„Cantilevered“ means supported on only one side.
ahhh makes sense thanks
I used a hacksaw and a small vice to make the cut. The way I did it the other halves were not usable because I wanted to give the wheels as much support as I could so made the cut as far to one side as possible. I tried to avoid cantilevering to reduce friction from added friction introduced by any angle in the axel. It’s perfectly acceptable to do it either way, but I wanted to keep things as compact as I could because 3 tracking wheels add up. :)