Hey,
So what i am trying to do is make a mechanism on our bot that basically acts as suspension for my non-motored wheels. Because i am planning on make a drive with tracking wheels with encoders but the problem that occurs is that, encoders wont work if the bot goes off the ground which could happen during the skills or match auto.
Does anyone have any ideas or designs that could help me achieve this idea?
if you have any questions, please ask
Thankyou
Look up „christie tank suspension“. It will help ensure contact, though there may still be a little slippage. However, I would HIGHLY recommend linking encoders directly to a motor. It is the best choice, to reduce inaccuracies.
people make tracking wheels for this very purpose, usually a free spinning wheel and encoder on a joint pushing into the ground by rubber bands or something.
that is what i want to do a join pushing on the ground but i cant imagine it, so if you had a pic or diagram or anything visual that would help a lot
I do not, but you could put it on a hinge or something on your drive and have rubber bands pulling the hinge down.
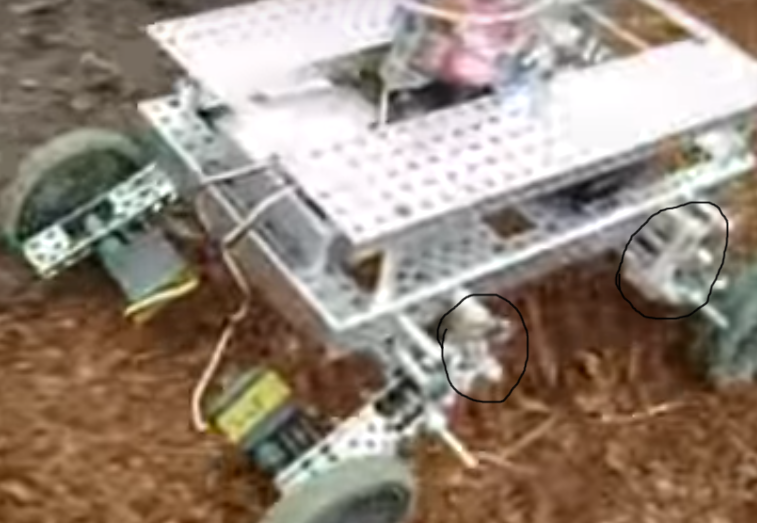
i found something like this but cant really understand whats really happening because of the quality
maybe you can see something ?
I don’t actually see it, but that looks like it would have rubber bands pulling each arm down which acts as suspension when the bot hits a hill
EDIT: I do see it, it’s closer to the center of the robot in relation of the pivot.
For precision position tracking dedicated unpowered tracking wheels work the best.
While there are multiple threads talking about math associated with position tracking, there are very few good pictures of the actual hardware freely available online.
For some reason, people who do position tracking like to literally keep it under wraps. 
or explicitly tell people (me) not to share the details of their build further. 
Luckily @ranOOm from team 2381 made a video where you can see tracking wheels build details at 27:30 on his robot:
Man you got to 2381 before me, they are very avid users of tracking wheels.
oh hey that’s me !
Keep in mind that tracking wheels need good (like better than ours) build quality to work properly with position tracking, especially over autonomous. Iirc most accurate tracking is only good for about 15 seconds of fluid motion before it needs to reset position?Just something to keep in mind.
do you have any idea on how we can make it better of a build quality because we need something that prevents the tracking wheels from coming off the ground even if the bot goes off ground
I don’t know if this is what you want, but here’s a basic sketch for a suspension system that we came up with back in 2017 when we thought getting over the low bar was going to be a bigger ordeal than it was.
I think the best way would be to have the wheel on a hinge with rubber bands pulling it down like stated before but you will want a hard stop to stop the wheel where it normally touches the ground so it doesn’t come off the ground with jerky driving. I can post a drawing if you need more help understanding.
I think i see what you mean but a drawing would help a lot.
please and thankyou
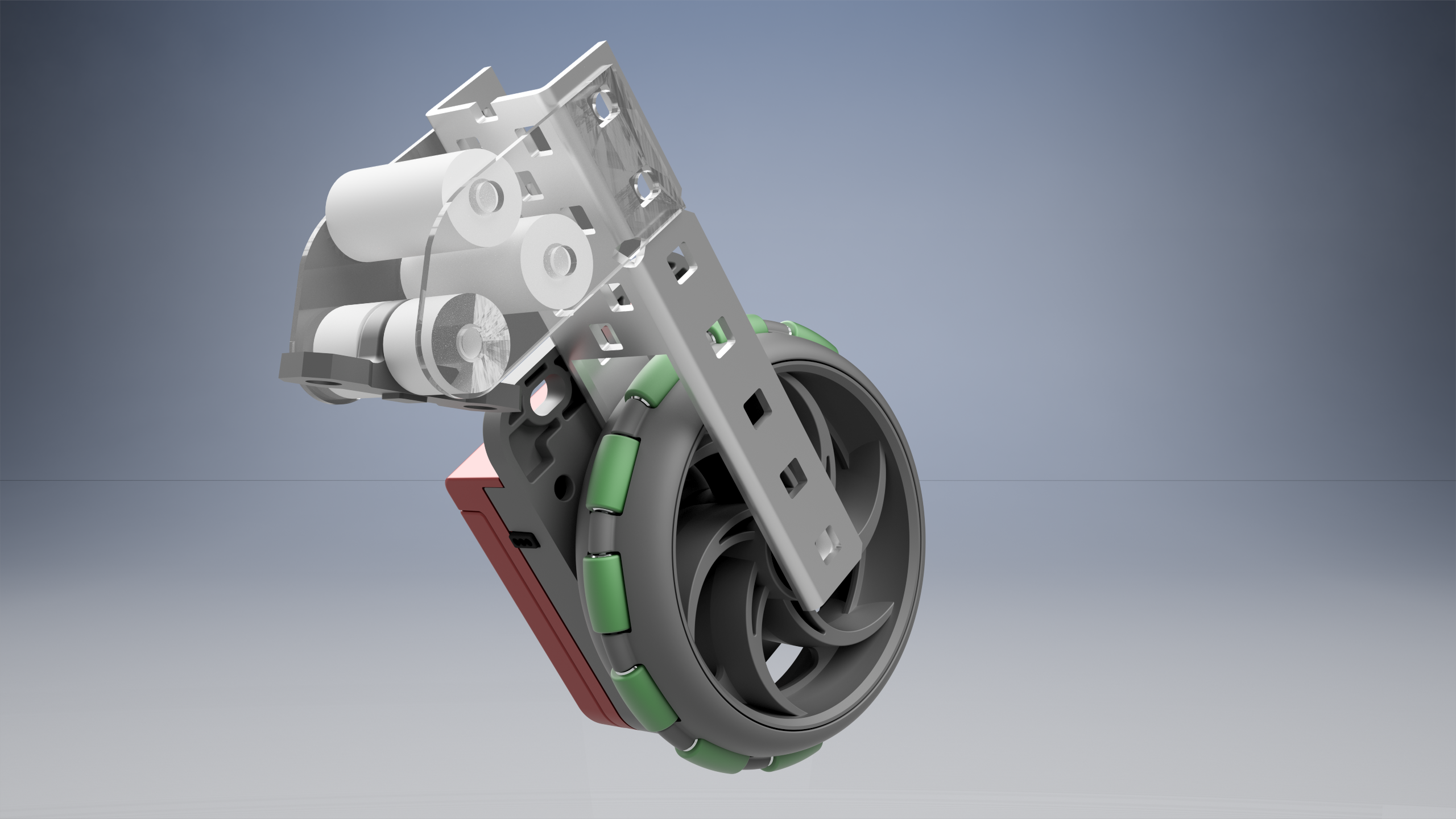
Also, @proto from team 240P had posted a rendering of their tracking wheel assembly CADs:
We’re currently working on a position tracking algorithm so I built a chassis specifically for the purpose of its development. Because there aren’t any subsystems on top it is pretty easy to see how the tracking wheels work. I can post some pictures after school if you’d like me to. :)
The problem with that is slipping. Dummy wheels that maintain contact are far superior.
An important thing to add is a stopper for the other side. If you have a ton of erratic movement, it is possible that the wheel assembly turn around to the other side with the tension. This adds to a ton of slipping and drift, which I learnt the hard way.
Yes Please that would help a lot @P_Mania